Ok so I went ahead and upgraded the project to 2019.3.0b8 following the upgrade instructions but after I imported the package I get an error:
Assets\AstarPathfindingProject\PackageTools\Editor\EditorBase.cs(23,20): error CS0103: The name 'EditorResourceHelper' does not exist in the current context
Would you know how to fix this, please? I’m kinda stuck right now…
Update 1:
I ended up deleting the A* folder and reinstalling it from scratch. Got a few error messages on the way, had to restart the editor a couple of times. That worked (no more errors), but now, after I closed Unity I can no longer open it. It systematically crashes at the start.
Update 2:
After restarting my PC it doesn’t crash anymore. So that’s a good point.
However after exiting play mode I got 2 errors. I figured they might have been related to the graph which was not updated so I pressed Scan to recreate the cache but now I got a flood of errors saying:
ArgumentException: burst
Pathfinding.EditorBase.FindProperty (System.String name) (at Assets/AstarPathfindingProject/PackageTools/Editor/EditorBase.cs:126)
Pathfinding.EditorBase.PropertyField (System.String propertyPath, System.String label, System.String tooltip) (at Assets/AstarPathfindingProject/PackageTools/Editor/EditorBase.cs:141)
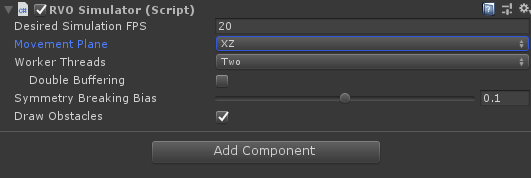
Pathfinding.RVOSimulatorEditor.Inspector () (at Assets/AstarPathfindingProject/Editor/RVOSimulatorEditor.cs:19)
Pathfinding.EditorBase.OnInspectorGUI () (at Assets/AstarPathfindingProject/PackageTools/Editor/EditorBase.cs:94)
UnityEngine.Debug:LogException(Exception, Object)
Pathfinding.EditorBase:OnInspectorGUI() (at Assets/AstarPathfindingProject/PackageTools/Editor/EditorBase.cs:96)
UnityEngine.GUIUtility:ProcessEvent(Int32, IntPtr)
They happen every time I have the A* game object selected.
Update 3:
The error messages still happen after exiting play mode:
InvalidOperationException: Not allowed to access vertex data on mesh '' (isReadable is false; Read/Write must be enabled in import settings)
UnityEngine.Mesh.SetVertexBufferData[T] (Unity.Collections.NativeArray`1[T] data, System.Int32 dataStart, System.Int32 meshBufferStart, System.Int32 count, System.Int32 stream, UnityEngine.Rendering.MeshUpdateFlags flags) (at <dfc62061cb3f4b1bb57c5179a5db6830>:0)
Pathfinding.Util.CommandBuilder.Build (Pathfinding.Util.RetainedGizmos gizmos, Pathfinding.Util.RetainedGizmos+Hasher hasher, Unity.Collections.NativeArray`1[T] buffers, UnityEngine.Camera camera, System.Boolean isGizmos) (at Assets/AstarPathfindingProject/Utilities/CommandBuilder.cs:391)
Pathfinding.Util.RetainedGizmos+BuilderData.SubmitPerCameraMeshes (Pathfinding.Util.RetainedGizmos gizmos, UnityEngine.Camera camera) (at Assets/AstarPathfindingProject/Utilities/RetainedGizmos.cs:185)
Pathfinding.Util.RetainedGizmos+BuilderDataContainer.SubmitPerCameraMeshes (Pathfinding.Util.RetainedGizmos gizmos, UnityEngine.Camera camera, System.Int32 versionThreshold) (at Assets/AstarPathfindingProject/Utilities/RetainedGizmos.cs:232)
Pathfinding.Util.RetainedGizmos.Render (System.Boolean allowGizmos) (at Assets/AstarPathfindingProject/Utilities/RetainedGizmos.cs:491)
Pathfinding.Util.RetainedGizmosWrapper.Submit () (at Assets/AstarPathfindingProject/Utilities/RetainedGizmosWrapper.cs:163)
Pathfinding.Util.RetainedGizmosWrapper.PostRender (UnityEngine.Camera cam) (at Assets/AstarPathfindingProject/Utilities/RetainedGizmosWrapper.cs:77)
UnityEngine.Camera.FireOnPostRender (UnityEngine.Camera cam) (at <dfc62061cb3f4b1bb57c5179a5db6830>:0)
UnityEngine.Camera:Render()
<RefreshOvertime>d__34:MoveNext() (at Assets/Enviro - Sky and Weather/Core/Scripts/EnviroReflectionProbe.cs:333)
UnityEngine.SetupCoroutine:InvokeMoveNext(IEnumerator, IntPtr)
And are followed by a series of other errors:
A Native Collection has not been disposed, resulting in a memory leak. Enable Full StackTraces to get more details.
And warnings:
Internal: JobTempAlloc has allocations that are more than 4 frames old - this is not allowed and likely a leak
Update 4:
Sigh. Well I feel I just jumped through all those hoops for nothing. The issue is still there, exactly as with the non-beta version. Agents don’t realize they block each-other way.
This is a major issue and a basic requirement. I genuinely hope that you can agree with that. A* is the best locomotion system I’ve tried so far. So much better than the Unity one.
Please let me know how I can be of help in sorting out this problem.
Update 5:
(I reverted to 4.2.8 since I had to keep working)