- A* version: 5.4.6
- Unity version: 2022.3.62f2
I had this working fairly well in astar 4.x using RichAI/seeker, but have upgraded to 5.4.6 using FollowerEntity and now I can’t get good results.
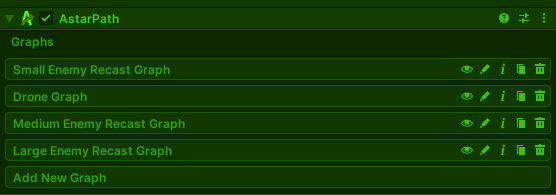
I have 4 recast graphs. 3 are used for enemy paths.
My enemy agents have no issue getting path to the target, but my tests using IsPathPossible fail on 2 of the 3 graphs.
Here’s the test method I’m using to manually test if path is possible at runtime.
I manually snap-drag the origin point around the map and call the method every Update().
The end Node is a fixed position that I know is on the graph in a valid spot. The start node is based on the origin point I move around.
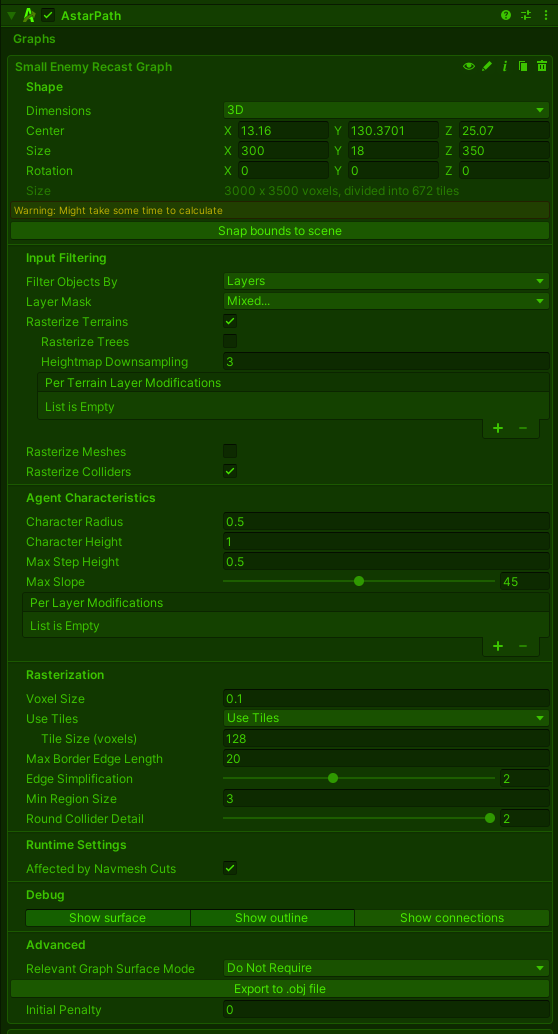
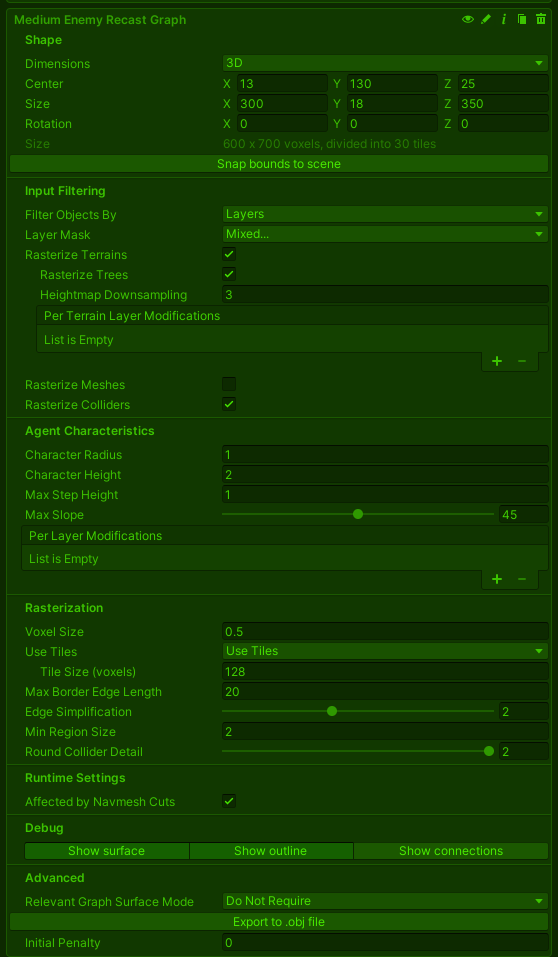
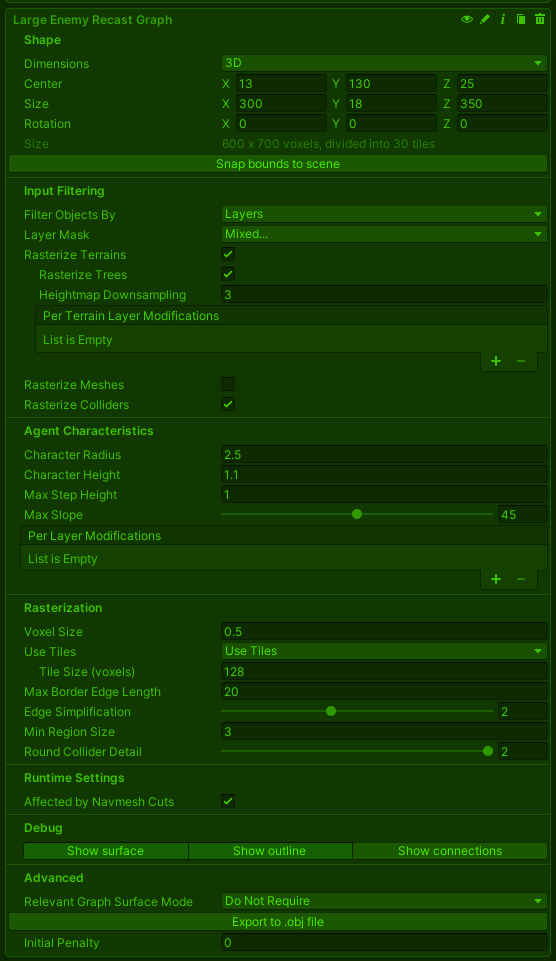
I have 3 enemy sizes (small/medium/large). Small is always returning TRUE, medium and large graphs are always returning FALSE.
I have a 4th graph for non-enemies that fly around (they basically ignore cuts and obstacles) but it’s the second graph/index in the list if that matters.
GIFs and screenshots to follow for each graph setup.
The method:
public void ButtonHandle_rageTest_TestAgentPathPossible()
{
if (this.rageTest_OriginPathPoint == null) return;
GraphMask startNodeGraphMask = new GraphMask();
//Debug.Log("startNodeGraphMask: " + startNodeGraphMask.ToString());
switch(this.rageTest_UnitSize)
{
case CombatUnitSize.Large:
startNodeGraphMask = GraphMask.FromGraphIndex(3); // .FromGraphName("Large Enemy Recast Graph");
break;
case CombatUnitSize.Medium:
startNodeGraphMask = GraphMask.FromGraphIndex(2); //.FromGraphName("Medium Enemy Recast Graph");
break;
case CombatUnitSize.Small:
startNodeGraphMask = GraphMask.FromGraphIndex(0); //.FromGraphName("Small Enemy Recast Graph");
break;
}
Debug.Log("startNodeGraphMask set for enemy size: " + this.rageTest_UnitSize.ToString() + ", graphMask: " + startNodeGraphMask.ToString());
NearestNodeConstraint startNodeConstraint = NearestNodeConstraint.Walkable;
startNodeConstraint.graphMask = startNodeGraphMask;
var startNode = AstarPath.active.GetNearest(this.rageTest_OriginPathPoint.position, startNodeConstraint).node;
var endNode = AstarPath.active.GetNearest(LG_LevelManager.instance.PlayerBase.IsPathPossibleTarget.position).node;
// Check if a path is possible on the graph
if (PathUtilities.IsPathPossible(startNode, endNode))
{
// TODO do we need a min distance check?
// PATH GOOD
Debug.Log("PATH GOOD");
using (Draw.ingame.WithColor(Color.green))
{
Draw.ingame.SolidBox((Vector3)startNode.position, 1);
Draw.ingame.SolidBox((Vector3)endNode.position, 1f);
}
}
else
{
// NO GOOD
Debug.Log("PATH BAD");
using (Draw.ingame.WithColor(Color.red))
{
Draw.ingame.SolidBox((Vector3)startNode.position, 1);
Draw.ingame.SolidBox((Vector3)endNode.position, 1f);
}
}
}