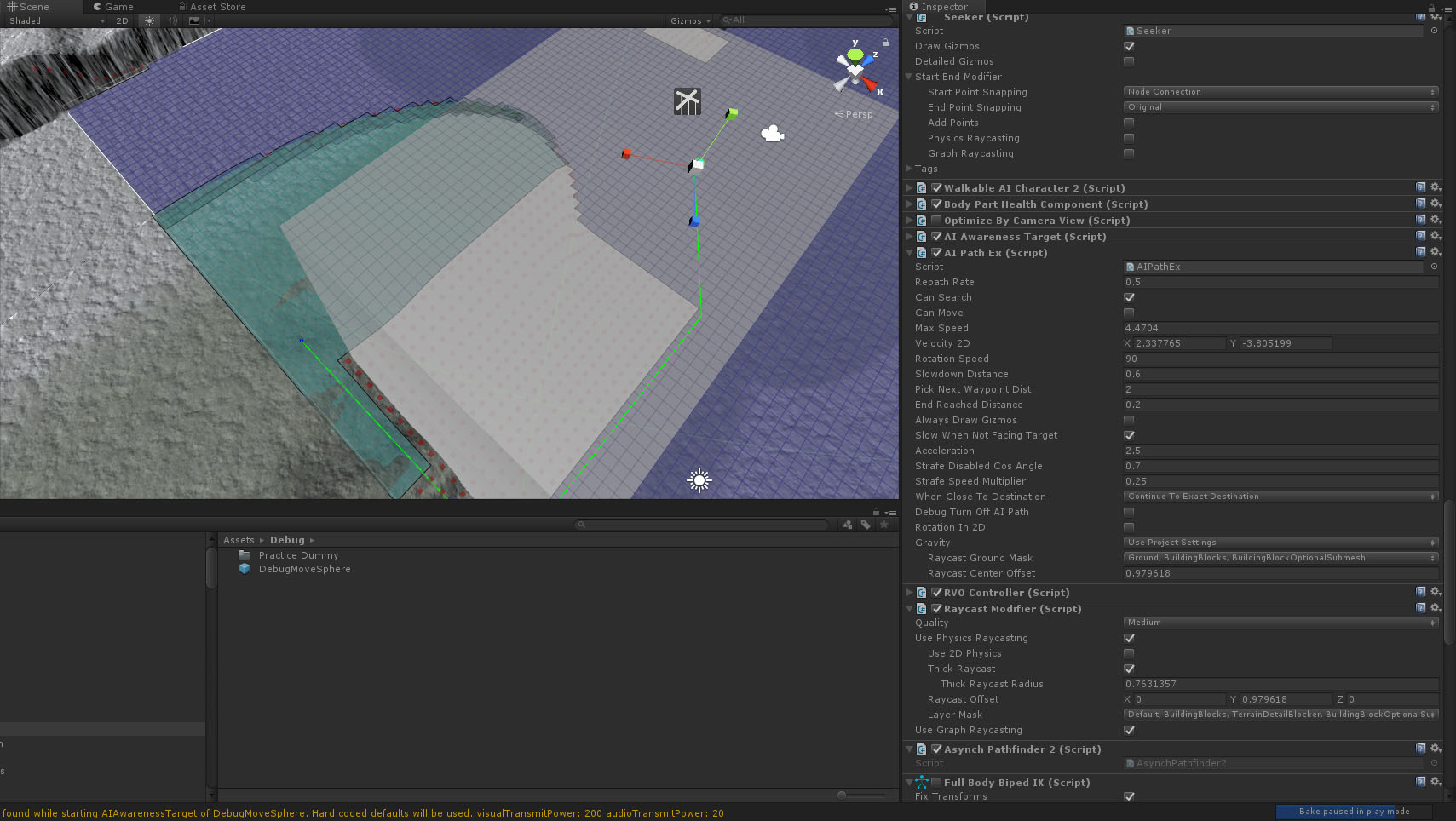
I’m using Layered Grid Graph where the intent is the AI can walk on top of walls, as well as around them. I’m finding an issue where if I intentionally set up a scenario where the destination is unreachable, the AI will try to walk through walls to get there.
In the screenshots, the ground has the layer “Ground” while the 4 blocks have the layer “Default”
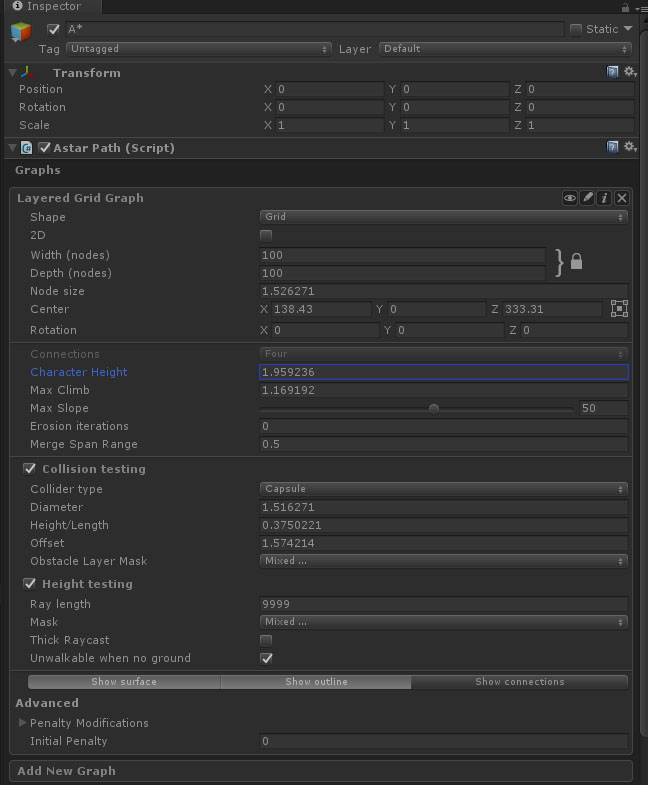
You can see that the destination point is completely surrounded by grid nodes with a red cube, so is unreachable. Also, the max climb is 1.169192 while the cubes are like 43 meters high.
If the wall was < 1.169192 meters high, the AI should step up onto it. > 1.169192 it should block pathfinding. At least that is the intent. If instead the wall was raised up off the terrain more than the character height (1.959236) I would like the AI to walk under it.
Using version 4.1.9
My character settings:

Height testing
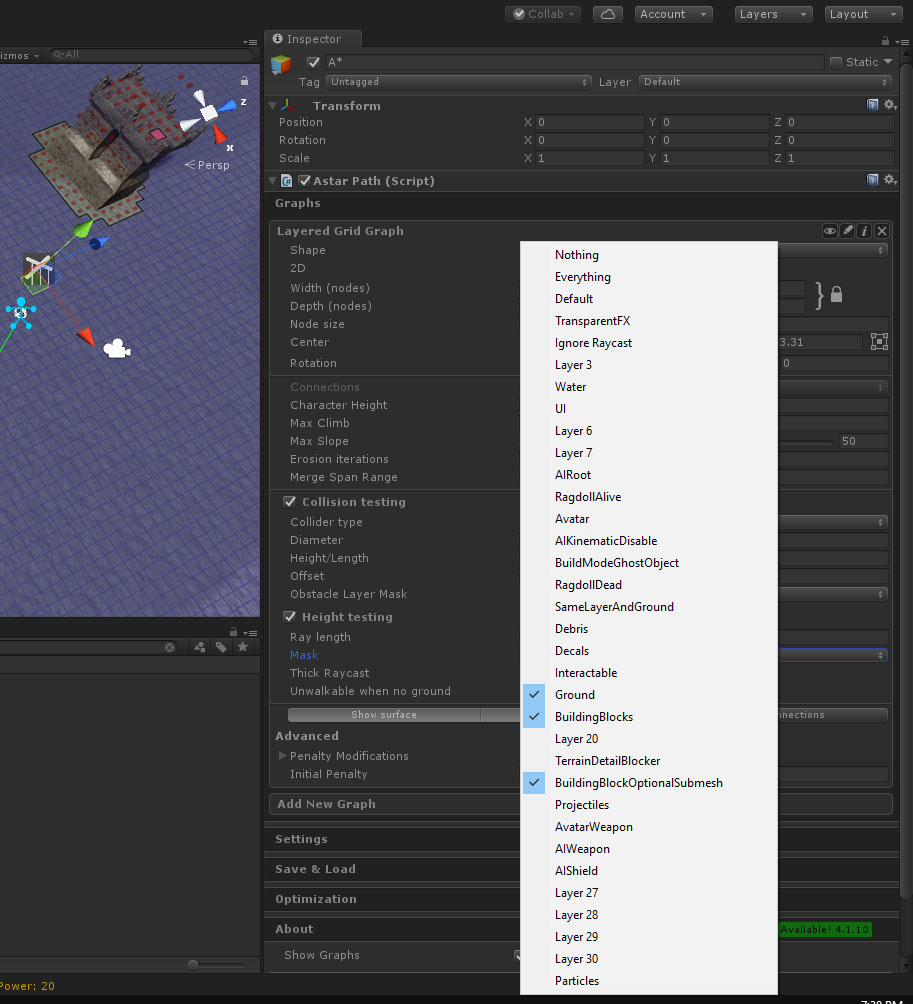
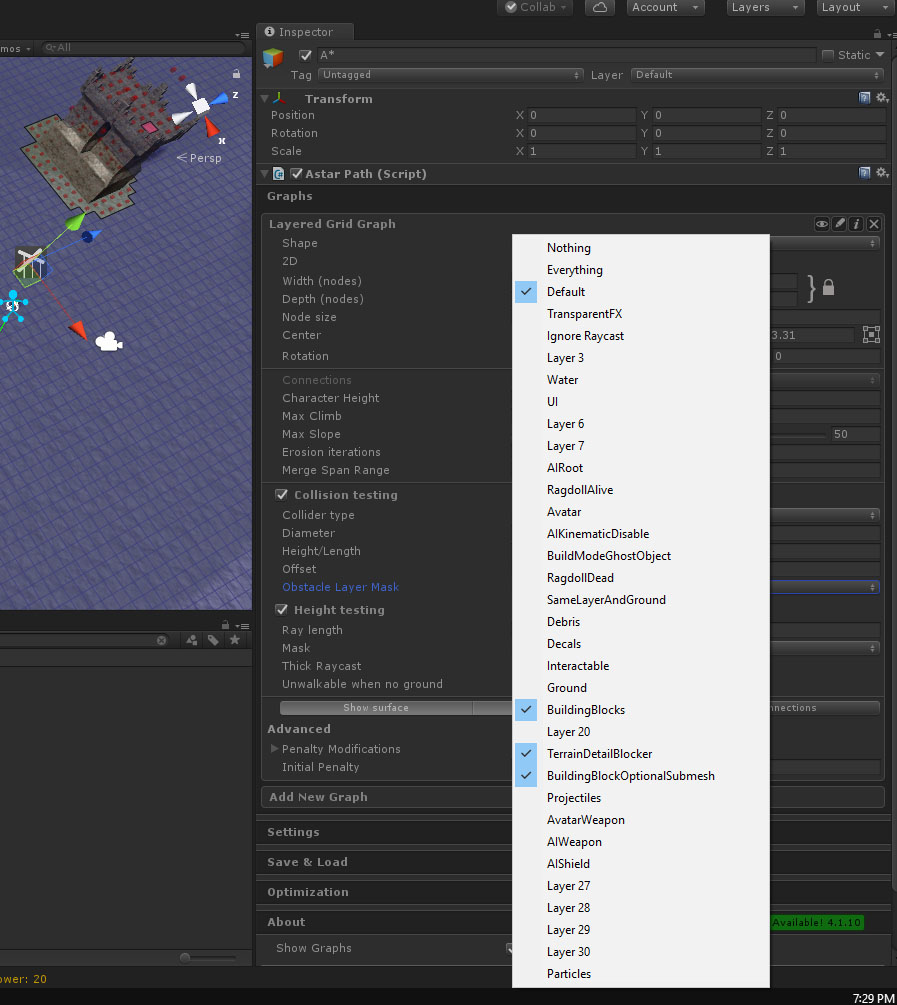
Obstacle Layer mask:
All settings
Update: Upgraded to 4.1.10 (Pro) and the issue still happens