Hi,
I have a hexagonal grid graph, everything seems to be working really good with this asset (so far) until I started testing the agents trying to reach a target that is no longer reachable.
In the above gif you can see that the agent starts to walk towards the target when it gets close I’m blocking it with Dynamic Obstacle Components, however, when the path is no longer reachable, the agent decides to walk through the obstacles? Any ideas why?
Below, I’m attaching additional information in regards to my Pathfinding settings, (and links to images due to new users are restricted to upload only 2 images)
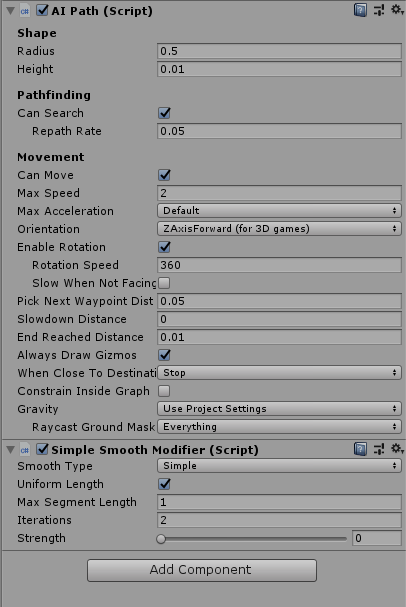
AStarPath
DynamicGridObstacle
Any help will be much appreciated, thank you
Patryk.
Also why do I not see the gizmos being drawn? (as opposed to the tutorial scenes)
Hi
Could you post what your Seeker -> Start End Modifier settings are?
The gizmos for the path are drawn if the Seeker has gizmos enabled in the scene view’s Gizmo dropdown.
Hi Aron,
Yes I will be able to at the beginning of next week. I currently have no access to PC.
I hope this thread will not be closed automatically.
Thanks,
Patryk.
1 Like
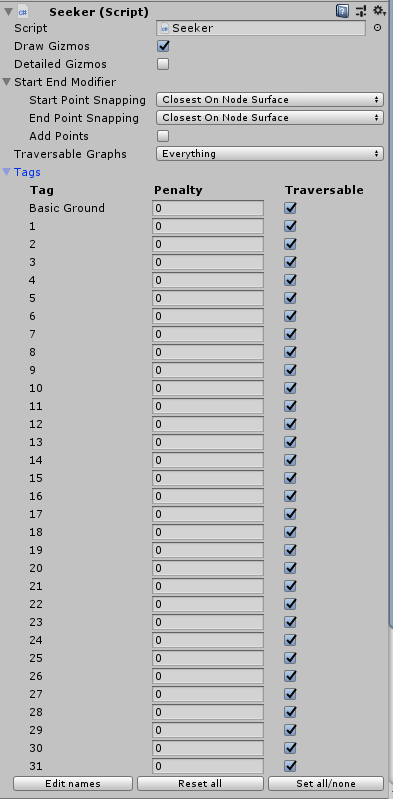
Here is my Seeker component. @aron_granberg
Hmm. I cannot see anything wrong there.
Does the agent enter that obstale if it starts from further away?
Hi @aron_granberg thanks for getting back to me.
This setting seems to have fixed the issue (I think)
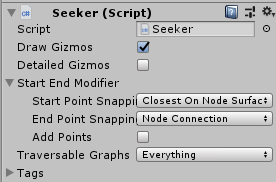
Would you be able to elaborate why this works please?
Also I can’t find any information on the following;
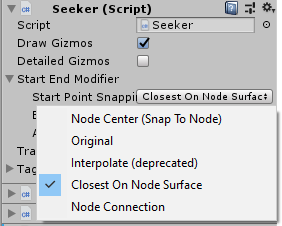
Could you please share an overview of each and how they could be used in different scenarios please?
Thanks,
Patrick.