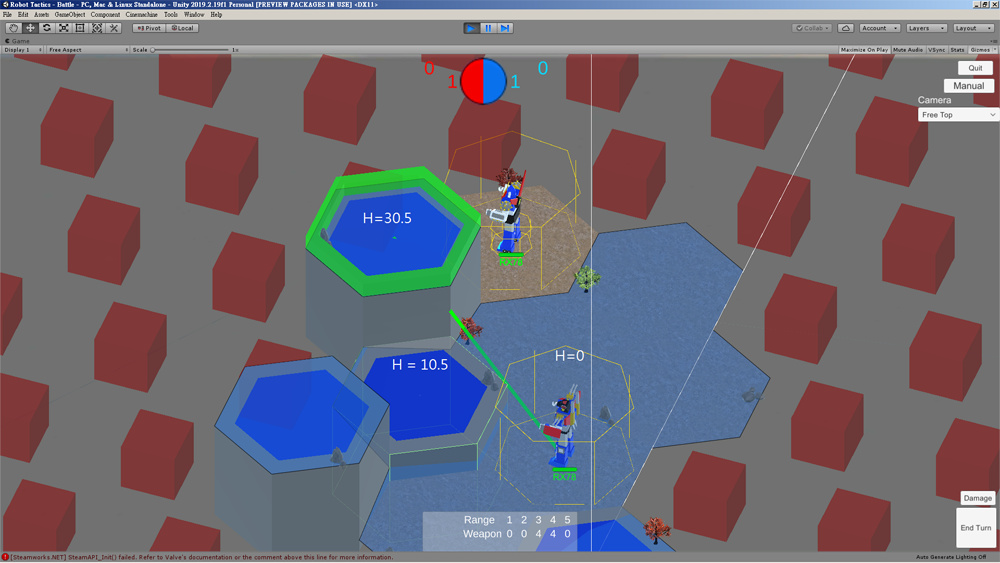
As shown in picture, the green hex icon (no collider attached)
is on a tile that y position is 30.5, and the tile nearby is 10.5,
robot y position is 0, climb height is 11. The scan also fine as shown.
But the debug log show false when mouse point to the green tile. I think path.error should be true on the green tile.
void DrawRobotMoveLine()
{
walkLine.enabled = true;
walkLine.startColor = Color.green;
walkLine.endColor = Color.green;
selectRBCursor.gameObject.SetActive(true);
Ray ray = Camera.main.ScreenPointToRay(Input.mousePosition);
if (selectedRobot)
{
if (Physics.Raycast(ray, out hit))
{
if (hit.transform.CompareTag(Data.TagTerrain) && TileManagement.TileIsEmpty(hit.transform.position))
{
// on terrain
var path = selectedRobotSeeker.StartPath(selectedRobot.position, hit.transform.position, OnPathComplete);
path.BlockUntilCalculated();
}
else
{
// on building
BuildingManager fm = hit.transform.GetComponent<BuildingManager>();
if (fm && fm.type == BuildingManager.Type.RBLauncher)
{
var path = selectedRobotSeeker.StartPath(selectedRobot.position, hit.transform.position, OnPathComplete);
path.BlockUntilCalculated();
}
else
{
// on enemy robot
RobotAI _rbAI = hit.transform.root.GetComponent<RobotAI>();
if (_rbAI && !hit.transform.root.CompareTag(selectedRobot.tag))
{
selectRBCursor.position = hit.transform.root.position;
selectRBCursor.GetComponent<Renderer>().material = redColor;
}
}
}
}
void OnPathComplete(Pathfinding.Path p)
{
Debug.Log(Time.time + " " + p.error);
if (!p.error && TileManagement.MoveStepCheck(p.vectorPath.Count, selectedRobotAI.MaxMoveStep))
{
selectedUnitDestination = TileManagement.GetTileTopSurfacePoint(hit.transform.position);
// shift up, so not overlap with map
walkLine.SetPosition(0, selectedRobot.position + 0.2f * Vector3.up);
walkLine.SetPosition(1, selectedUnitDestination + 0.2f * Vector3.up);
selectRBCursor.position = selectedUnitDestination;
selectRBCursor.GetComponent<Renderer>().material = greenColor;
}
}
}