I found this post from years ago and I’m still seeing what I believe is the same issue (or inconvenience):
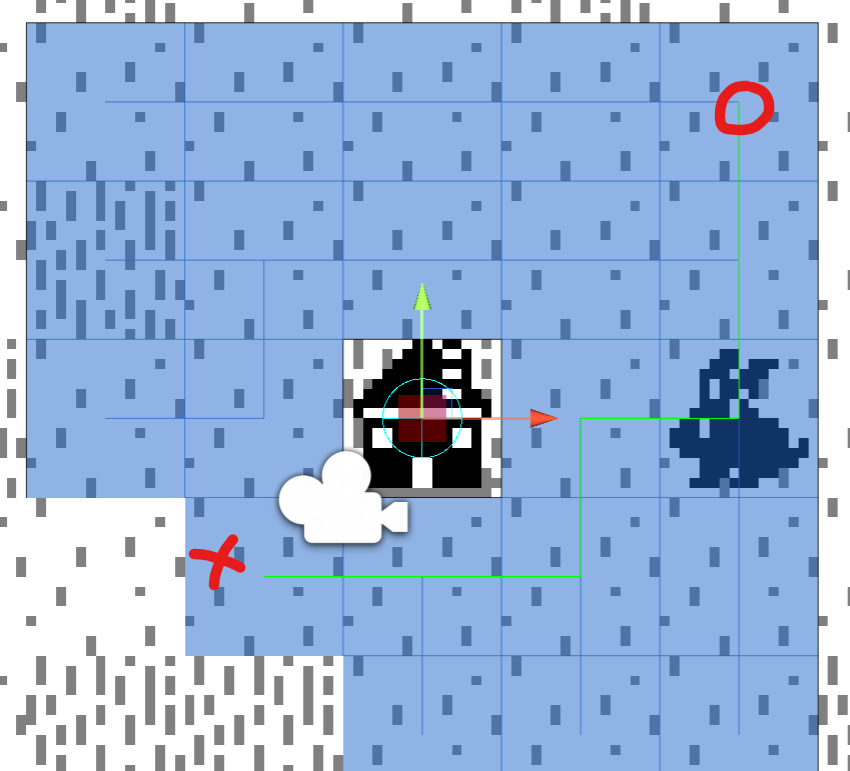
On a very simple grid graph, trying to path to an obstacle results in a path that sometimes picks a node that is not the closest to the seeker/agent. In the example below, the destination is the house, and the ideal nearest node would simply be to the left of the rabbit. But the path returned would give me arbitrary nodes around the house, which yes is “near” but not really ideal.
Feels like I’m missing something obvious for AStar to just give me the closest node to the seeker.
Thanks in advance for any pointers.