Hello,
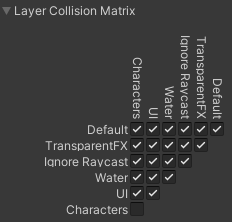
I’m trying to implement local avoidance for my agents. As long as both are moving they seems to avoid each other, but if one is standing still and the second one has exact same destionation then he push the other one. I’ve disabled collision for them in physics settings:
Is there something am I missing? I expect him to stay and wait till he can actually reach destination without pushing the other agent.