We have been using a Funnel modifier on a high resolution recast graph. It is generating some strange results, and the errors seem to be based on world space directionality.
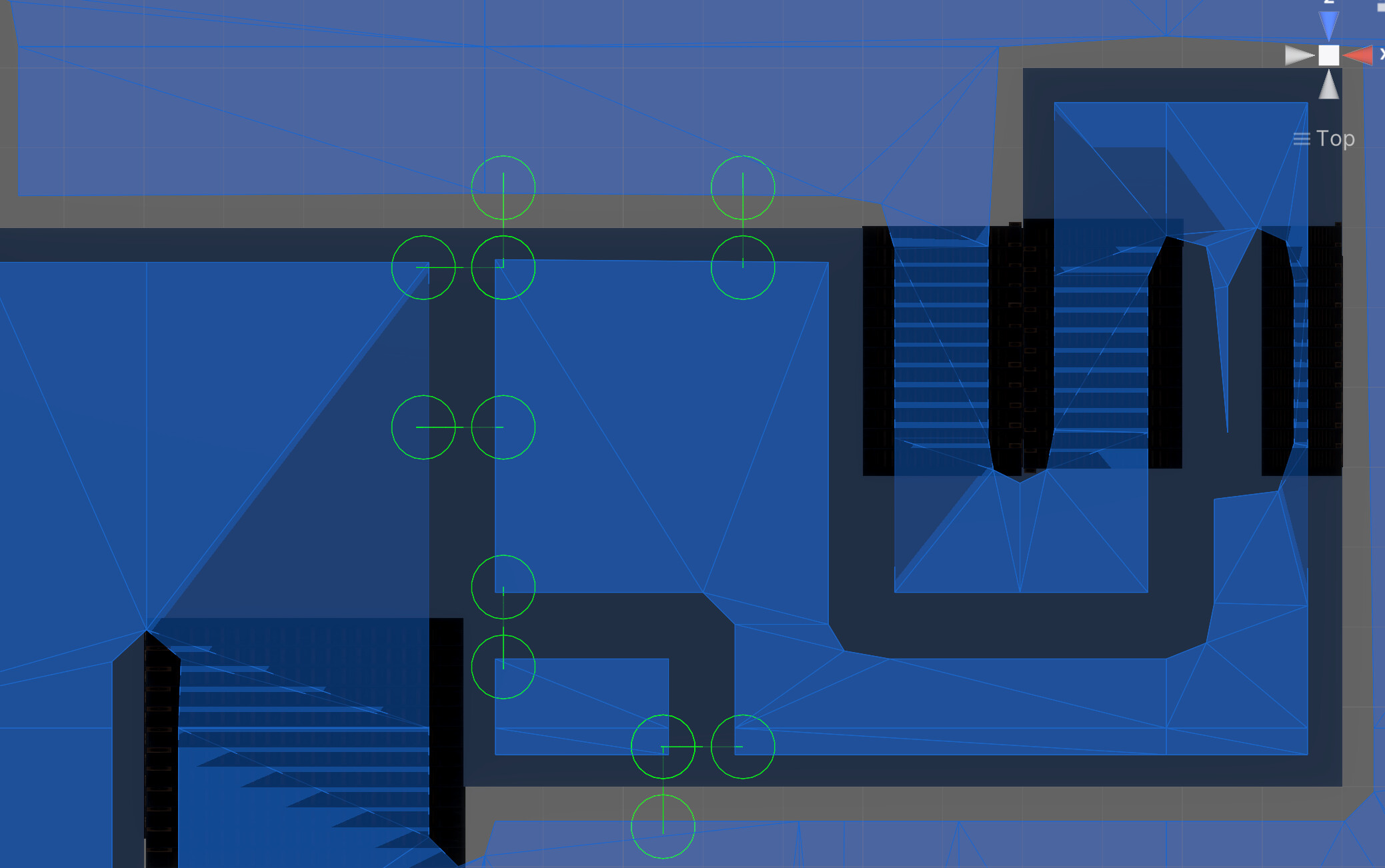
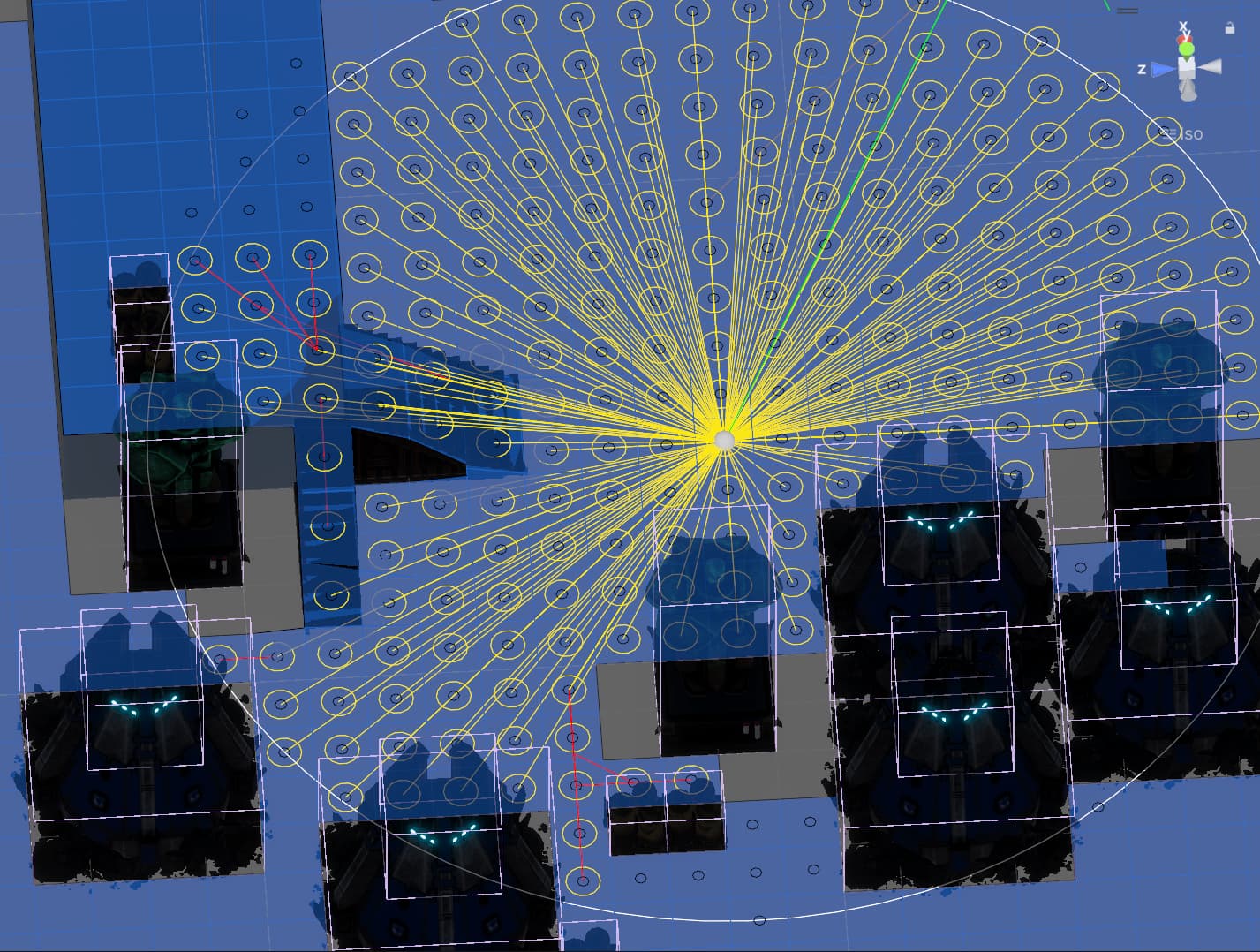
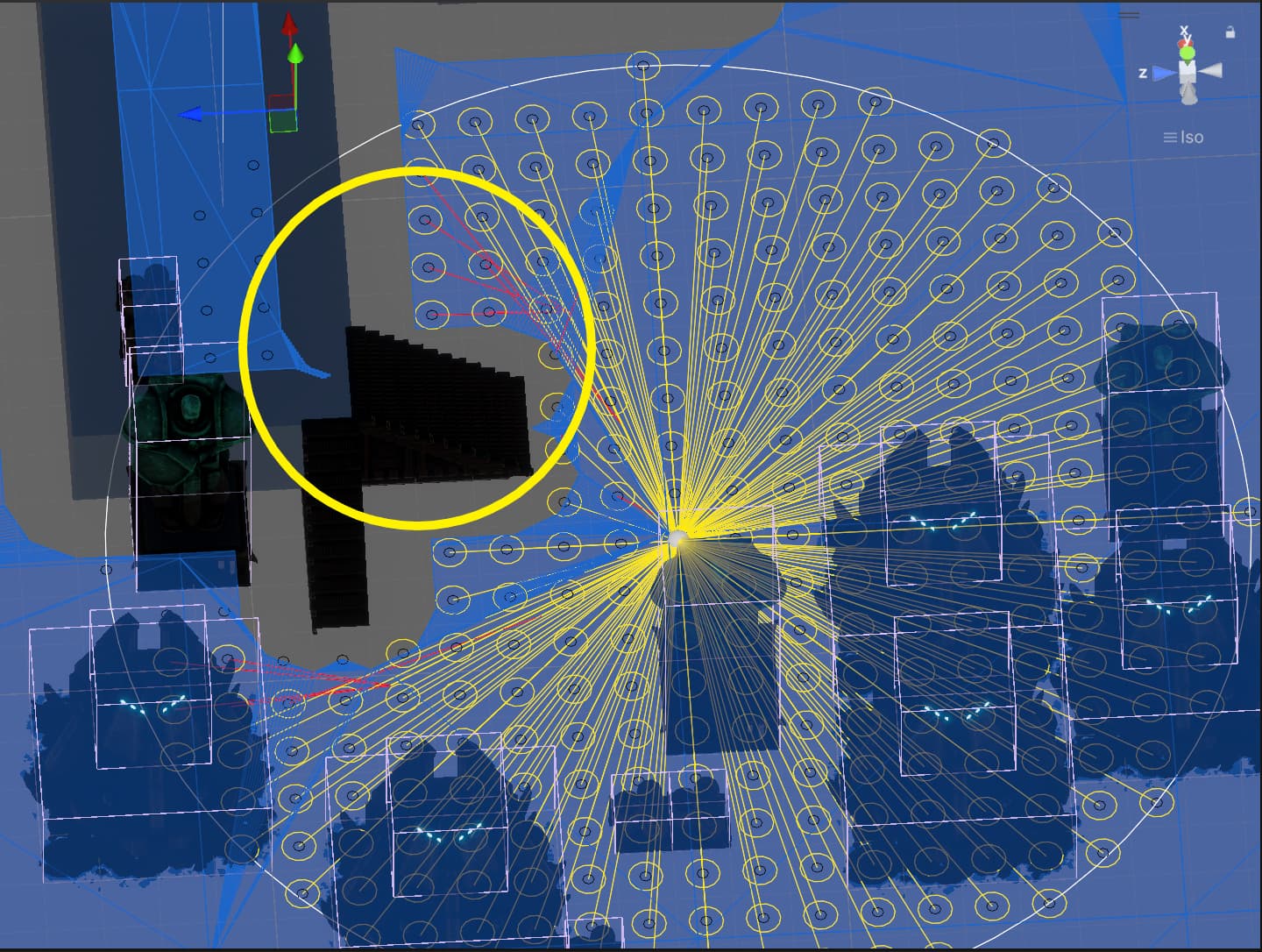
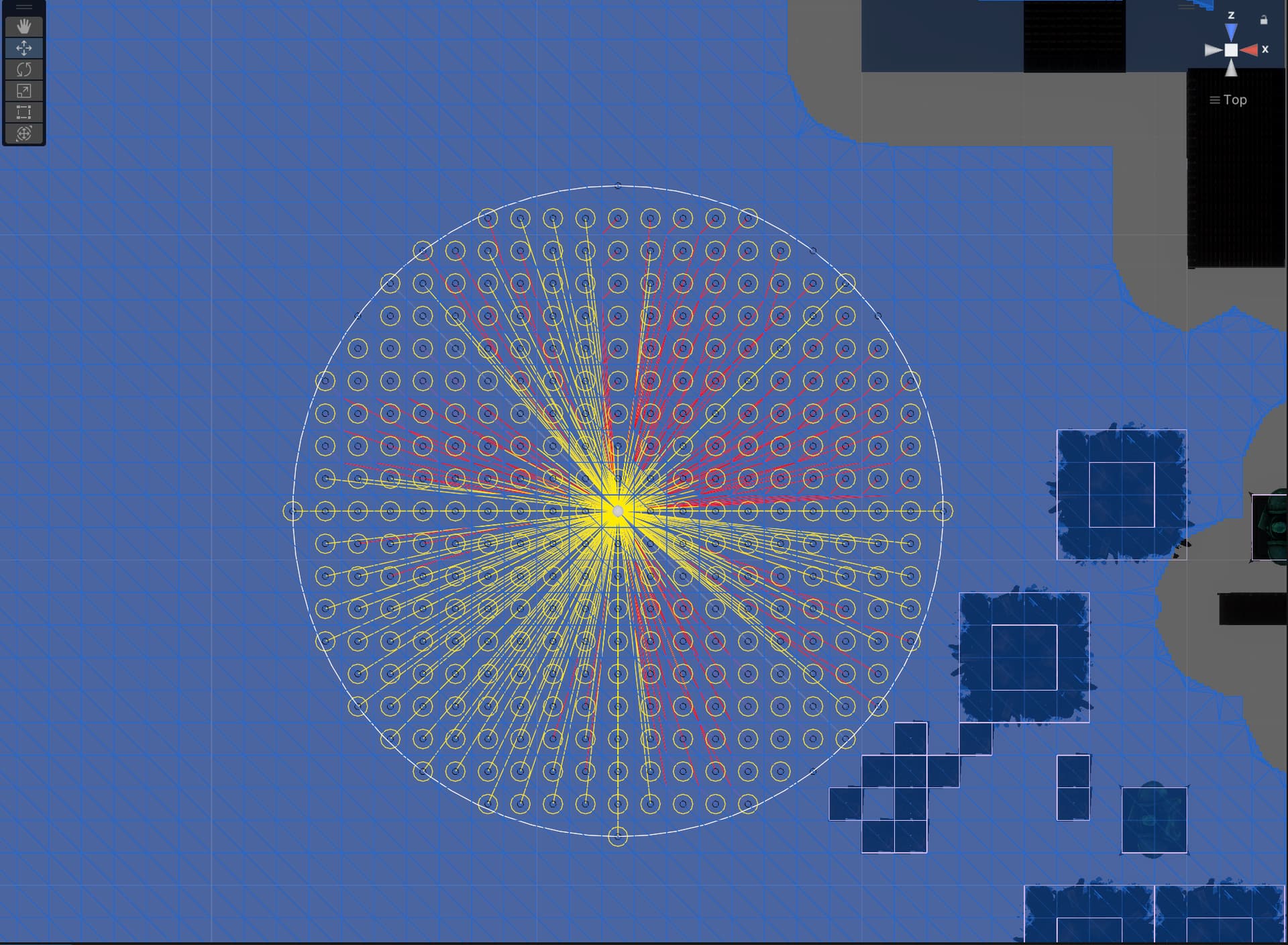
In the above image, you can see the paths that a funnel modifier provides in a completely empty area.
The yellow circles are target locations, the yellow lines are paths that are straight, and the red lines are paths which have a corner in them.
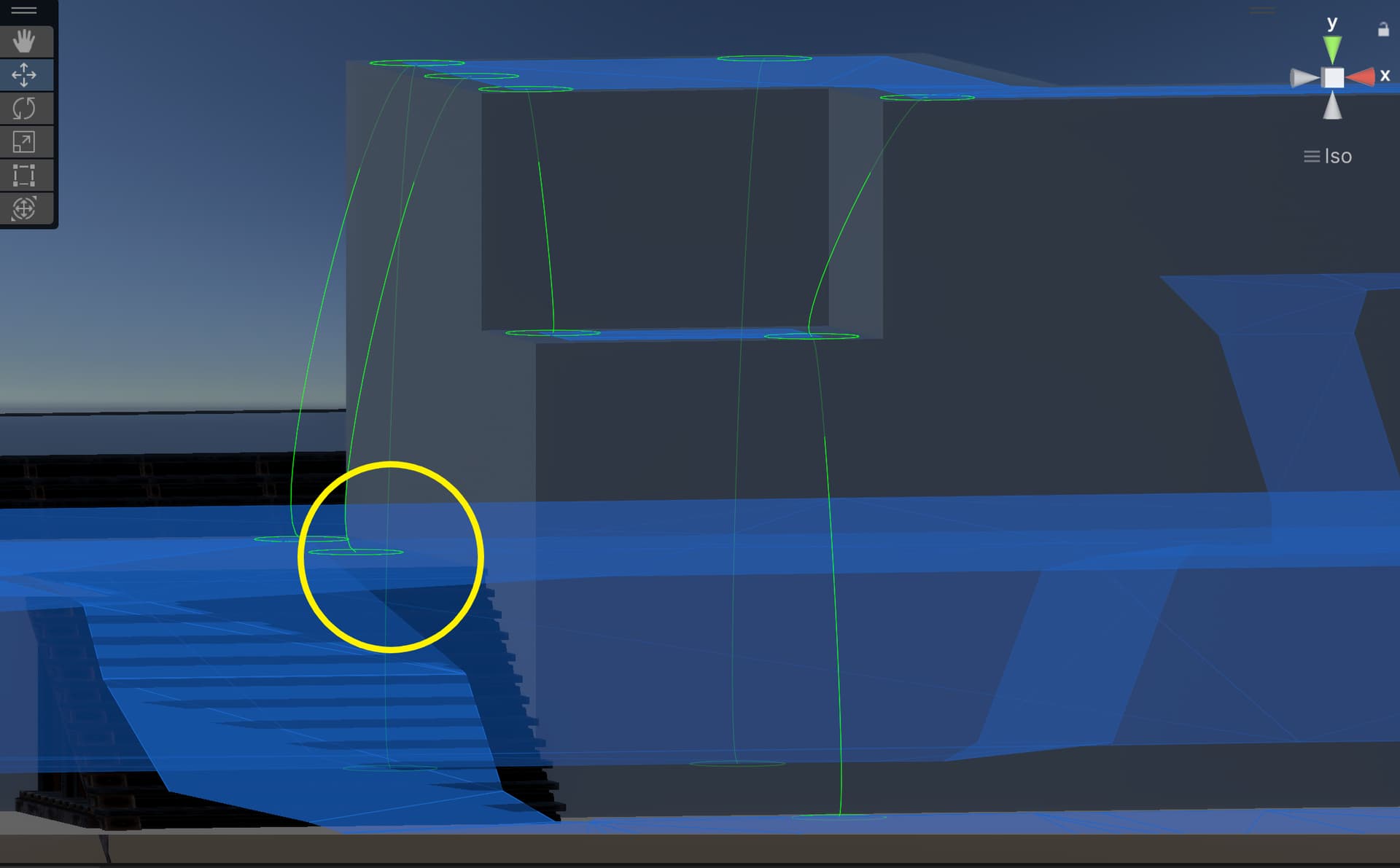
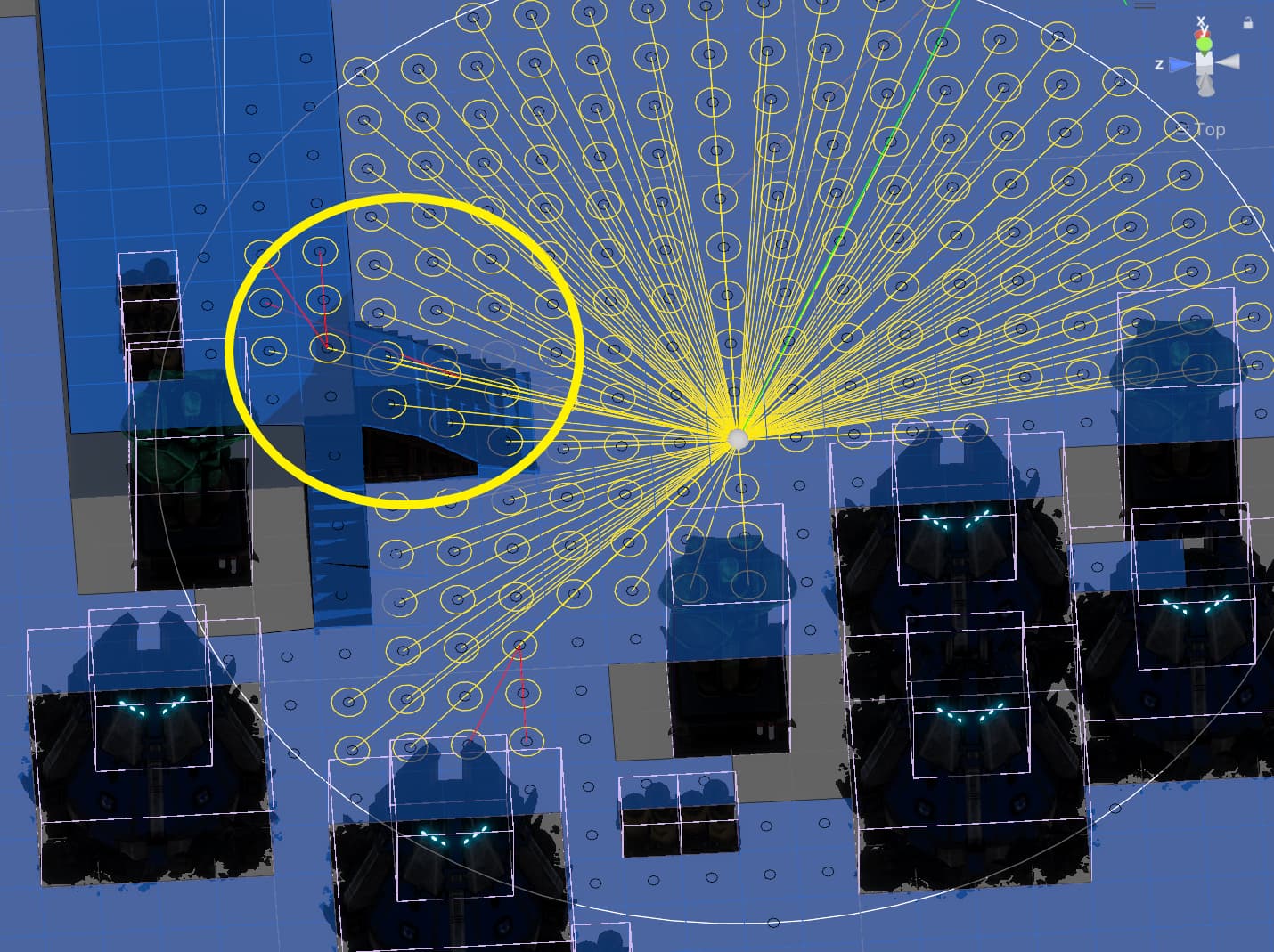
I’ve circled a particularly bad case in yellow.
Now in an empty area, we would expect all lines to be yellow, as the paths should all be straight. We see that in the bottom right quadrant, but less so in other quadrants. This suggests something weird (floating point error?) is going with the algorithm.
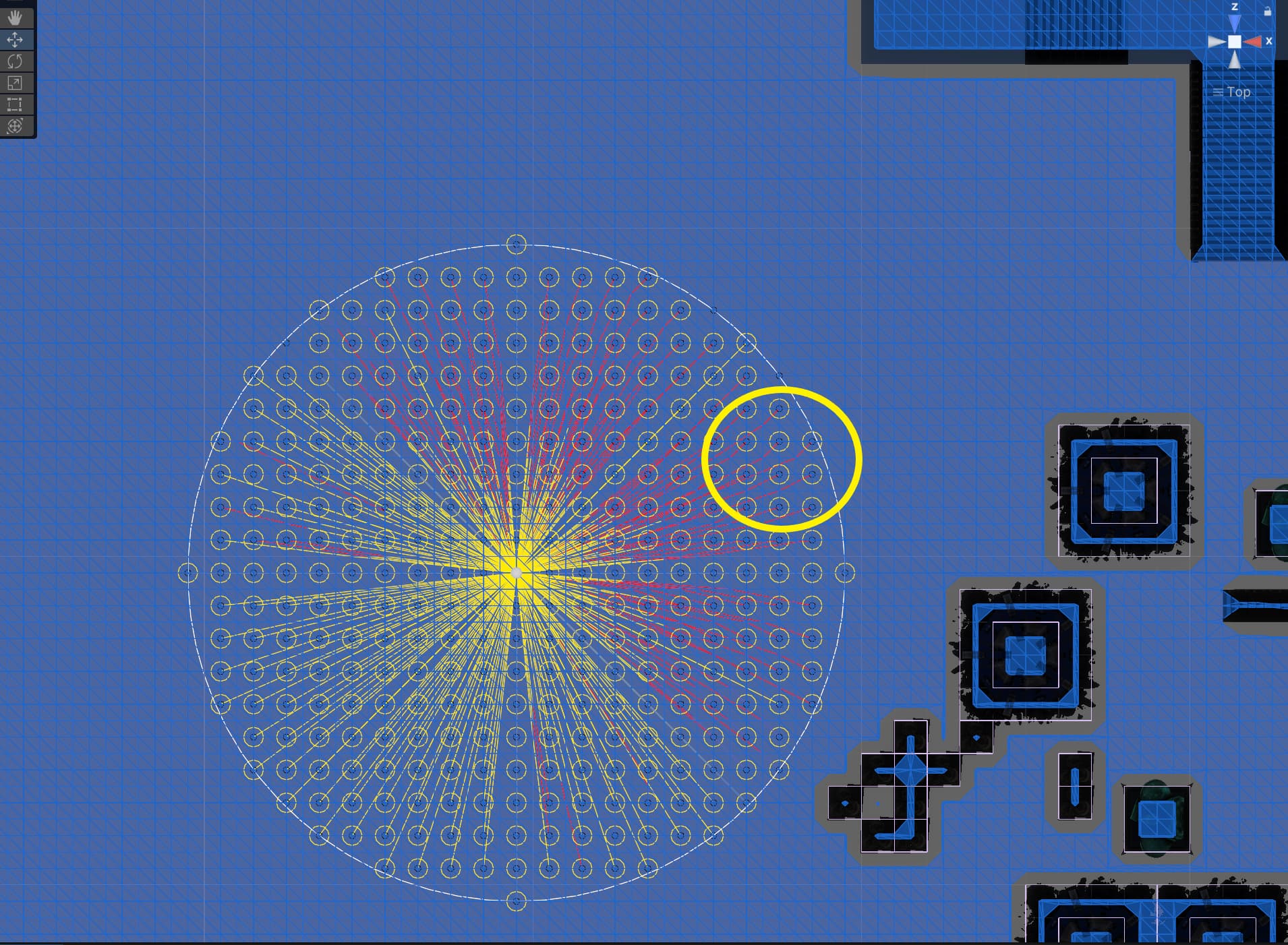
Similar locations yield the same results, which show it’s not an issue with the graph itself. (see below)
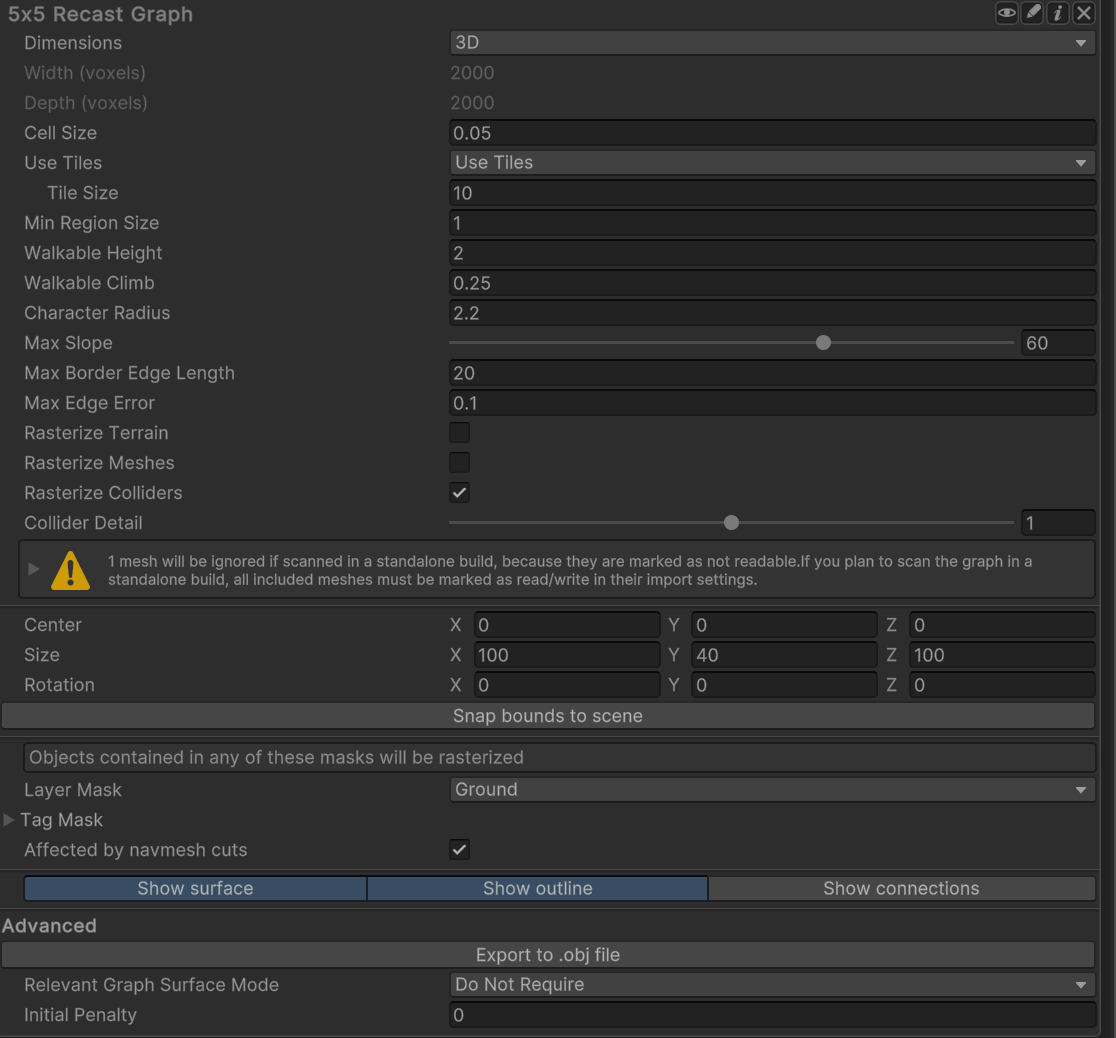
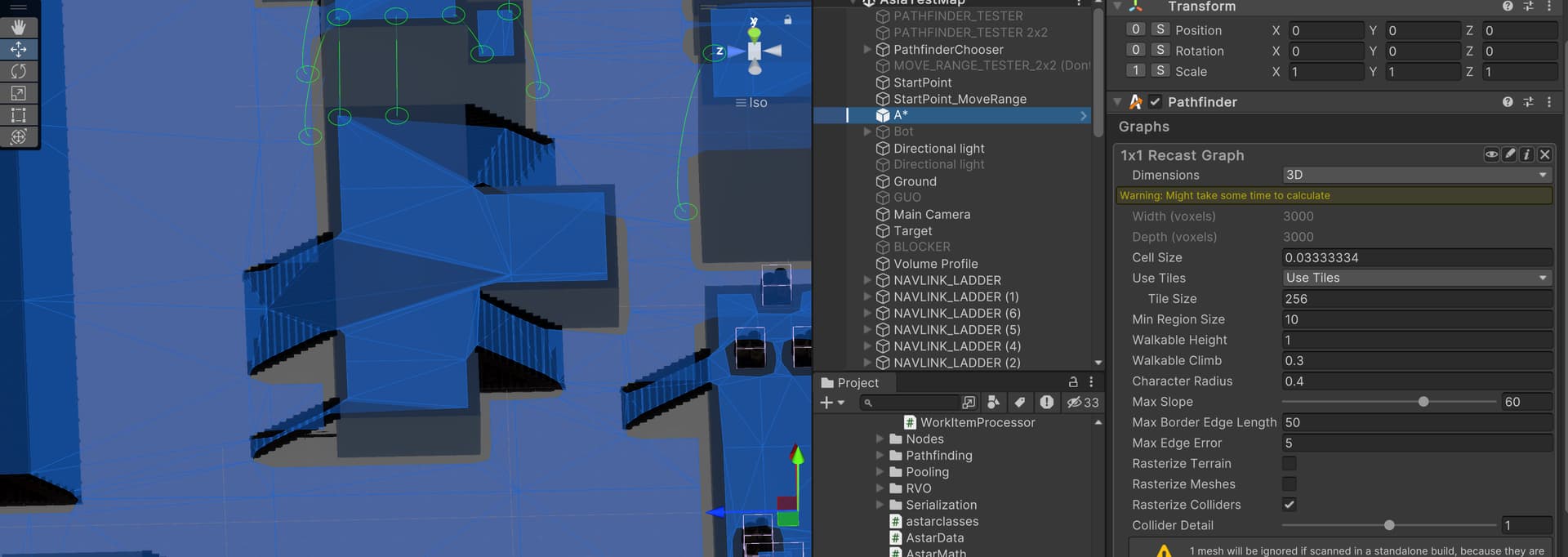
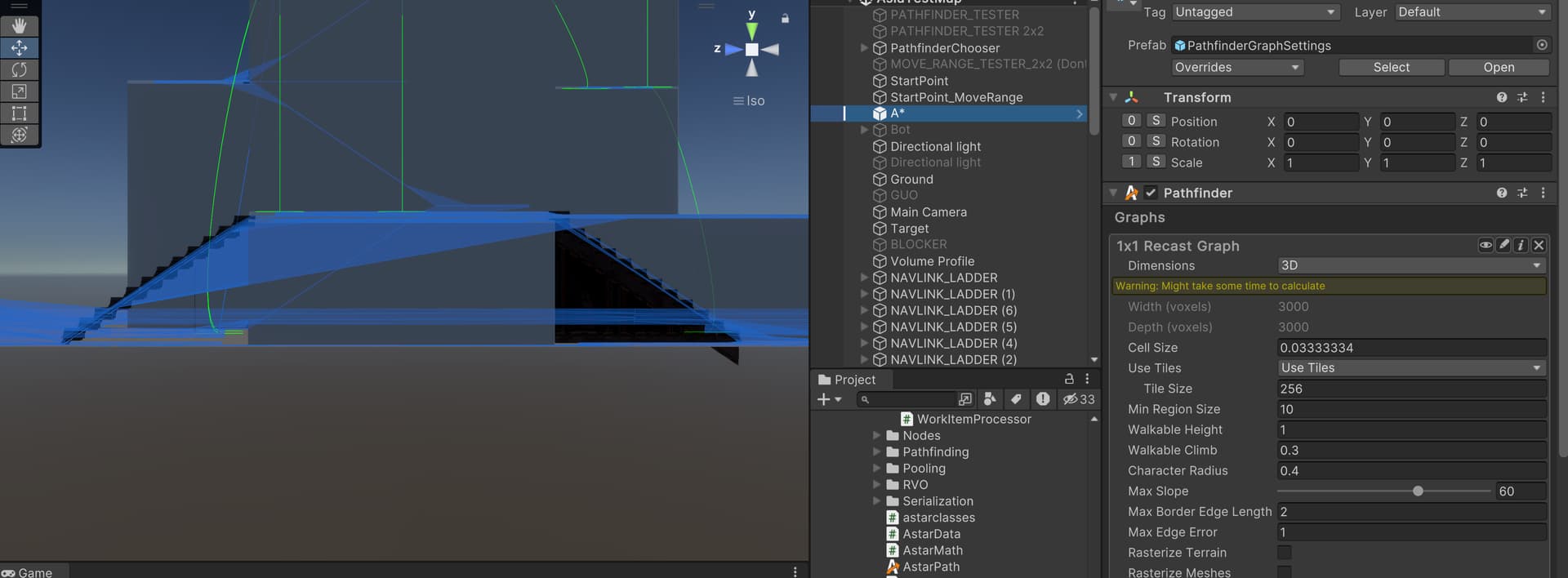
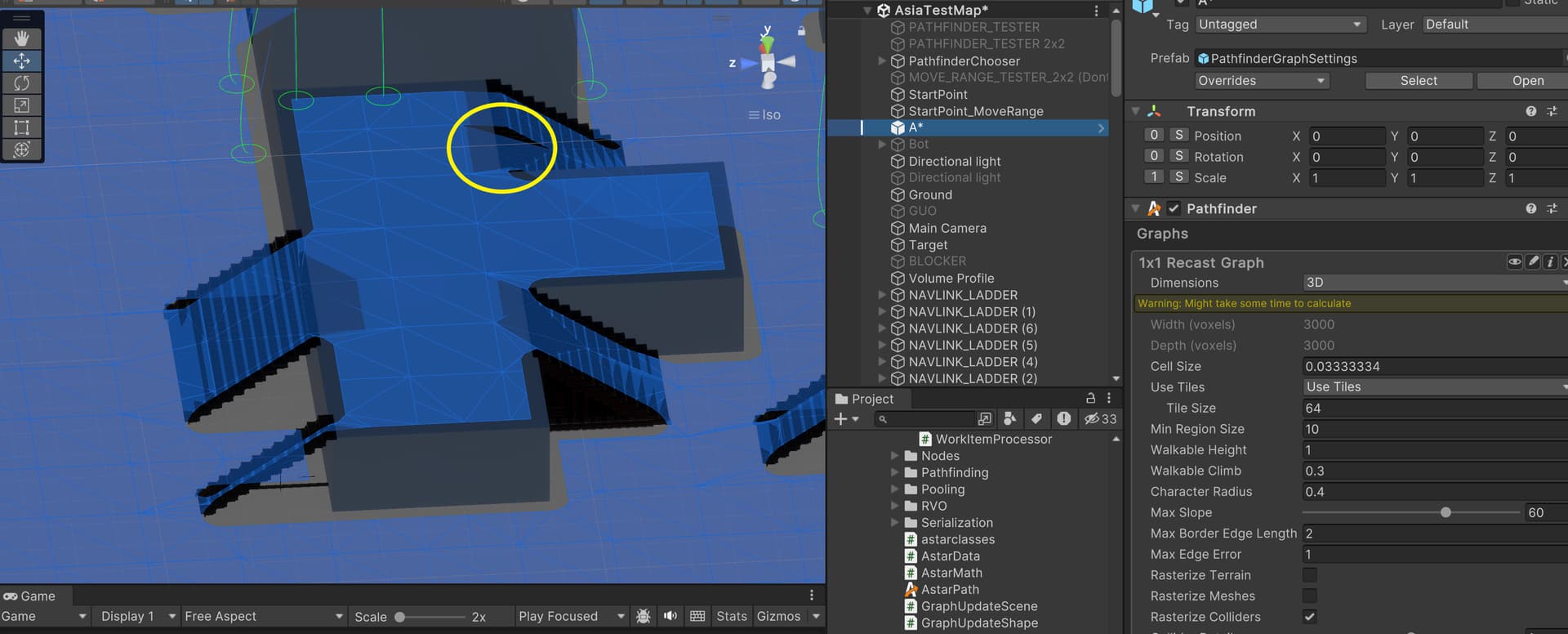
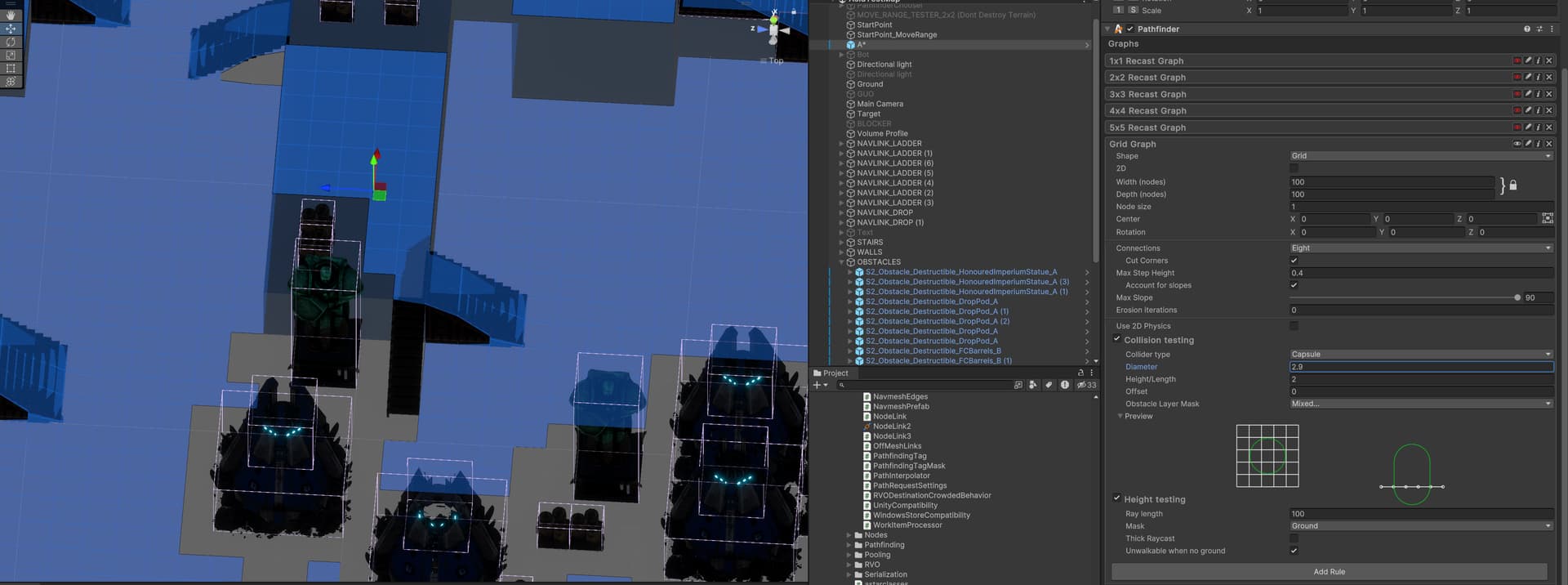
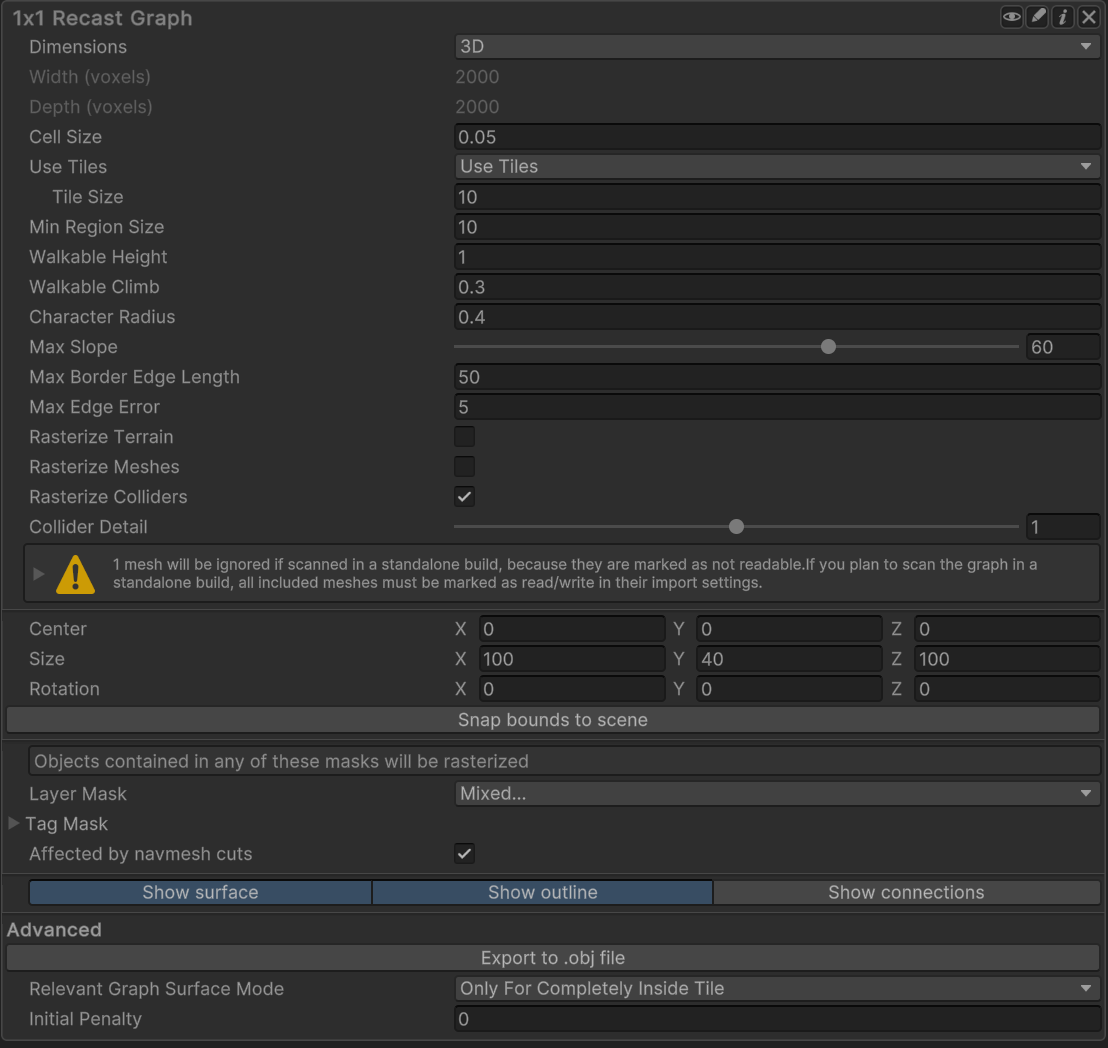
My settings for these results are:
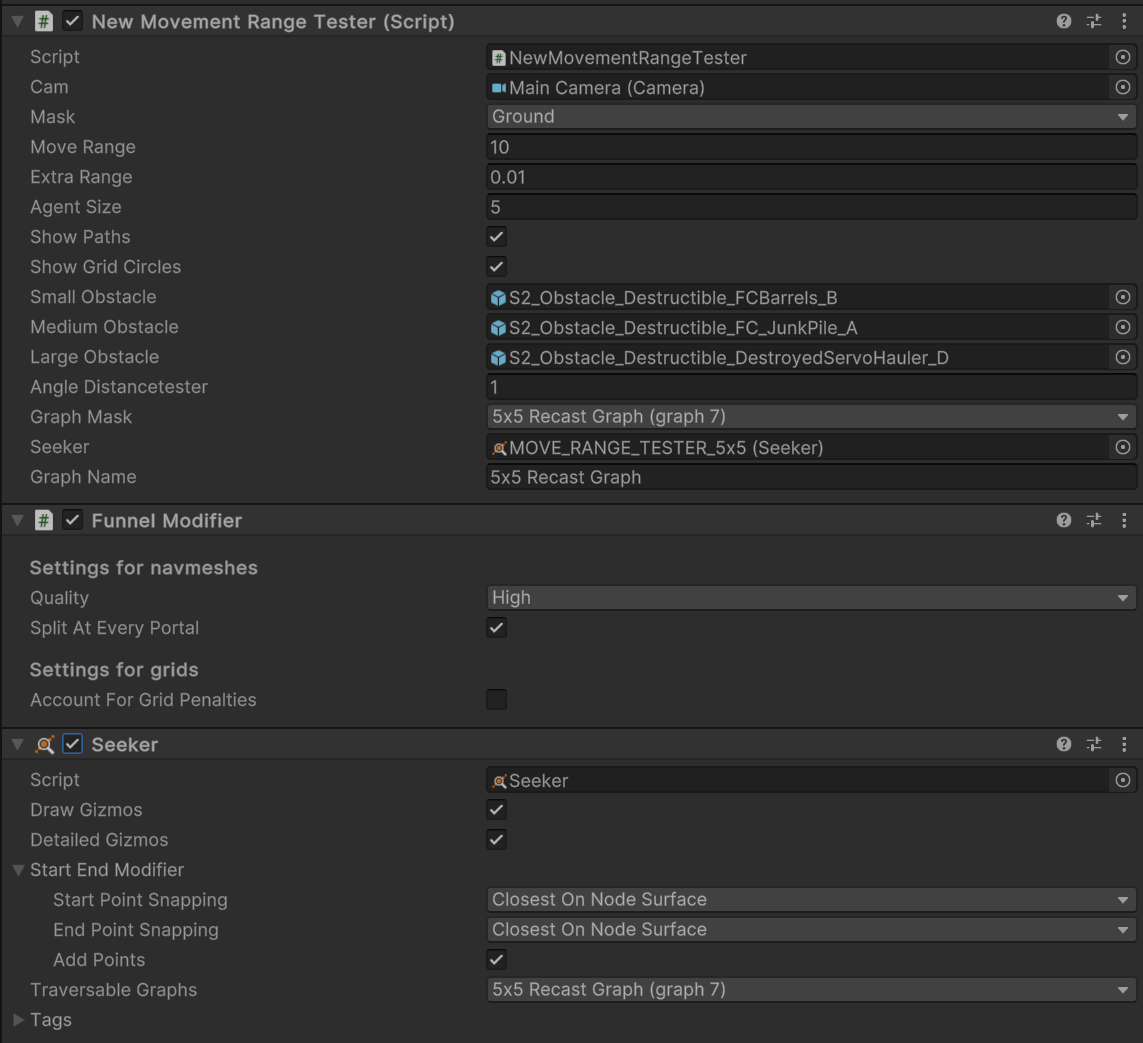
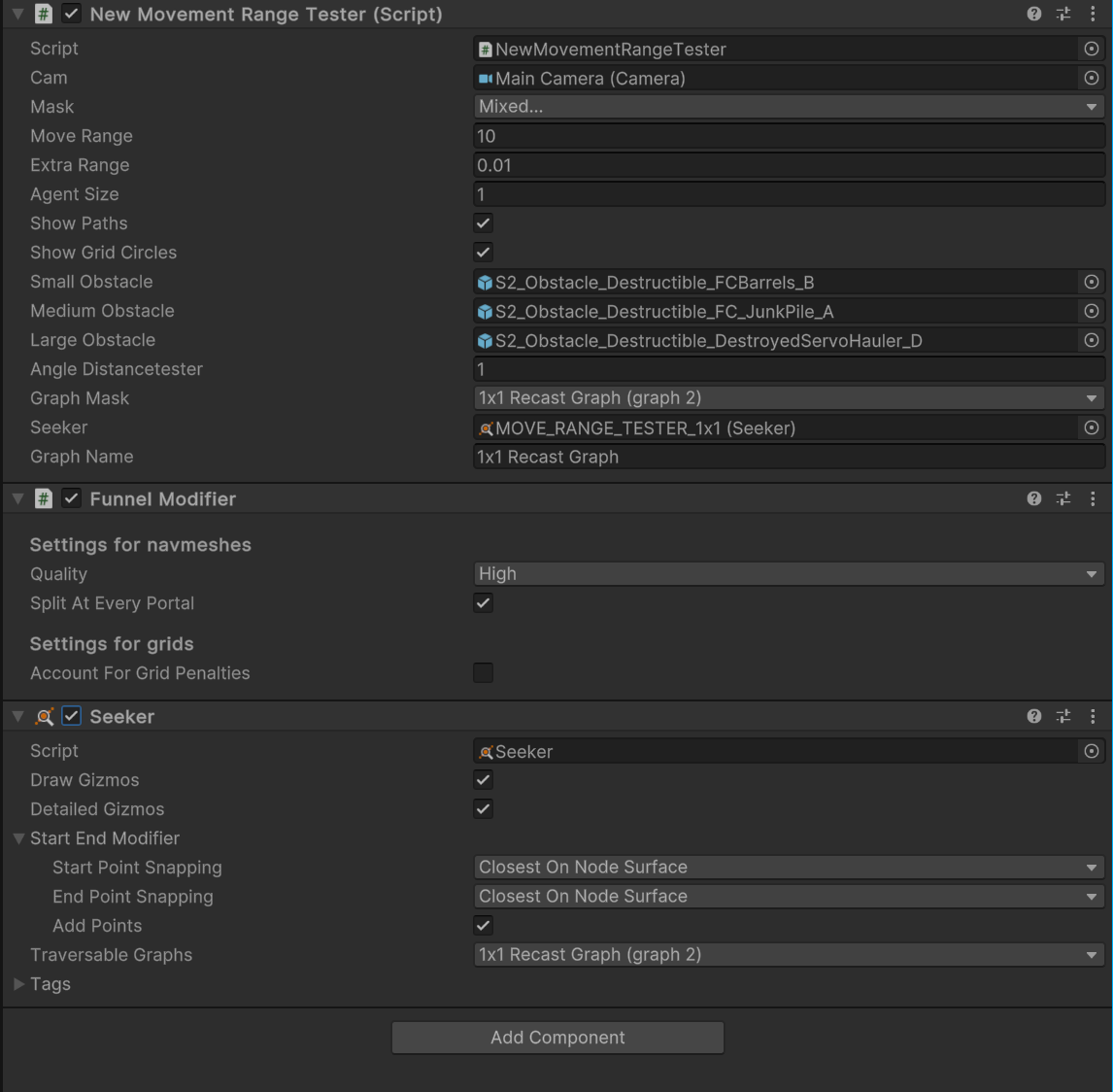
and the funnel/seeker setup is:
We have tried playing with all the different settings (“Split At Every Portal”, “Start/End Modifiers”, etc), all with similar results.
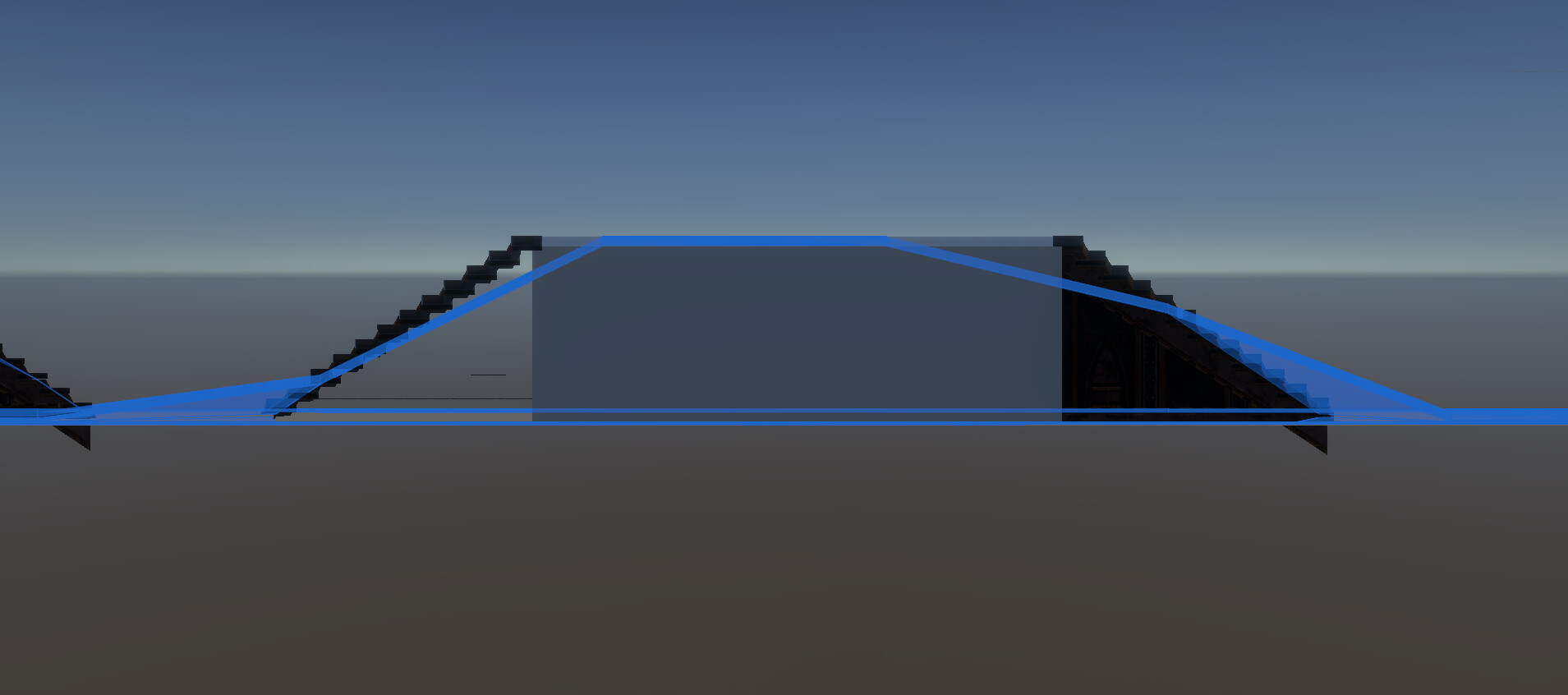
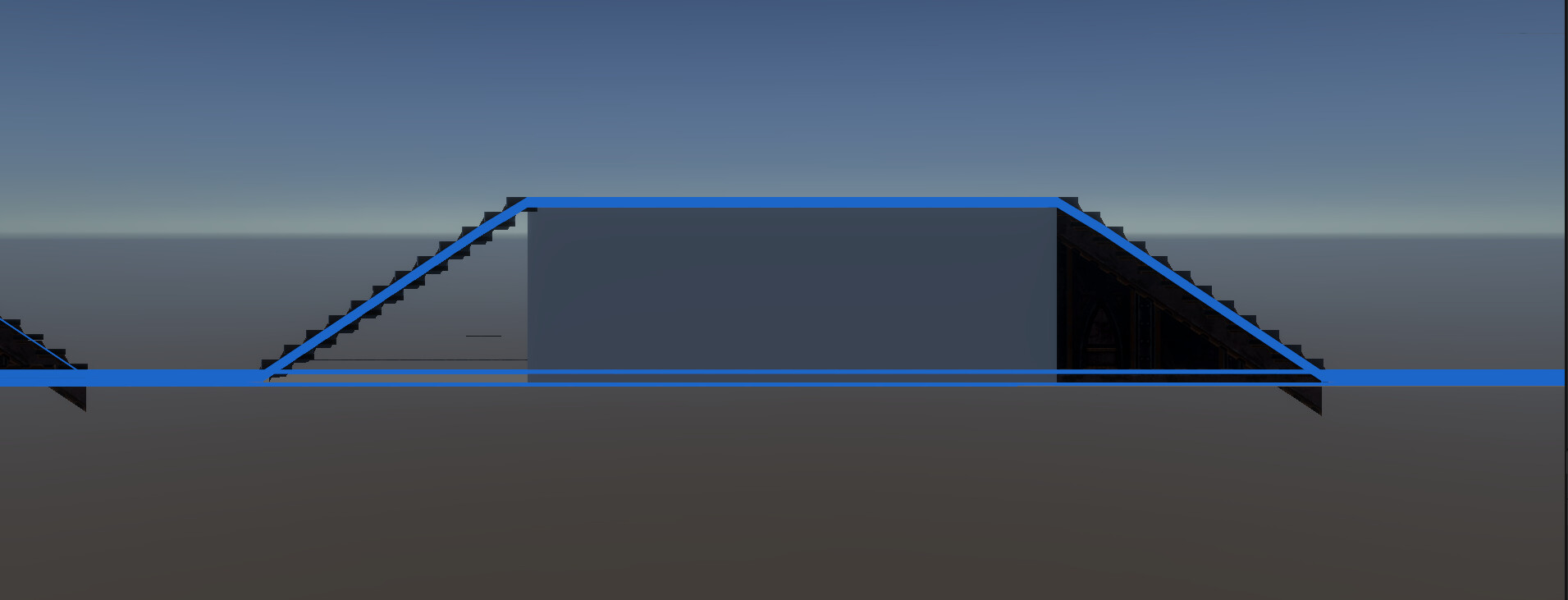
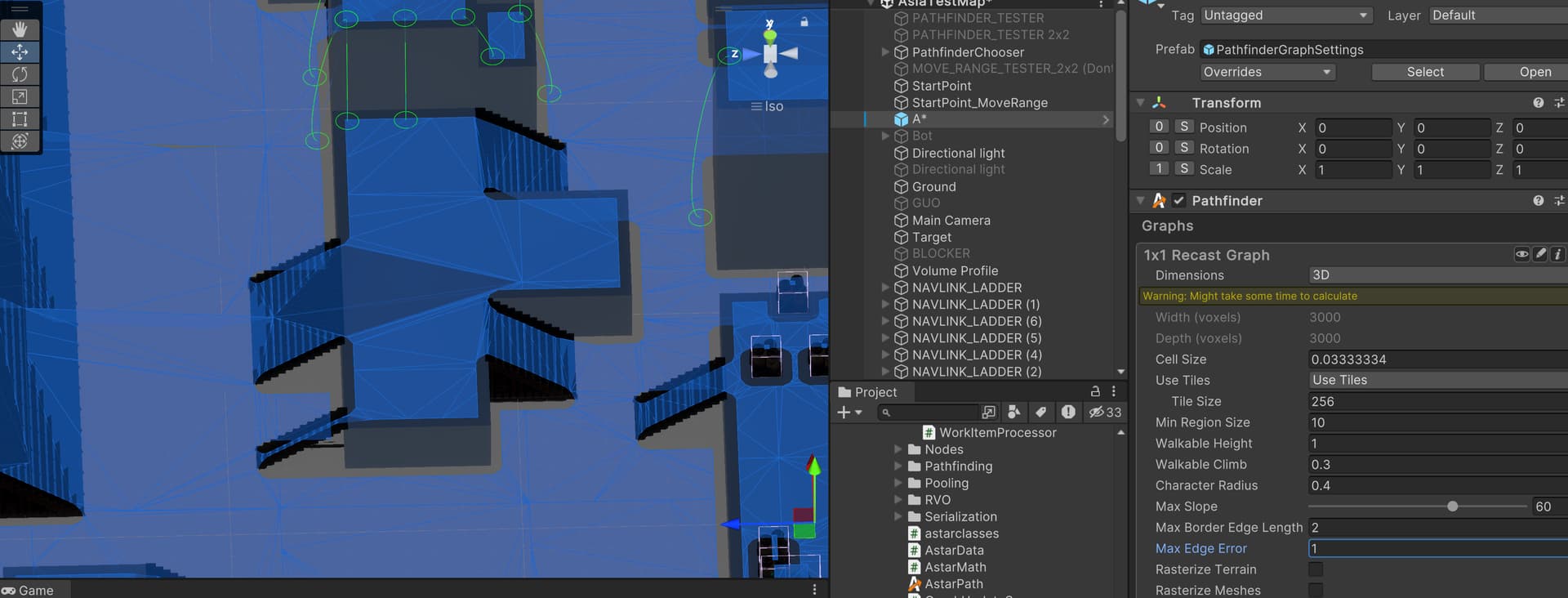
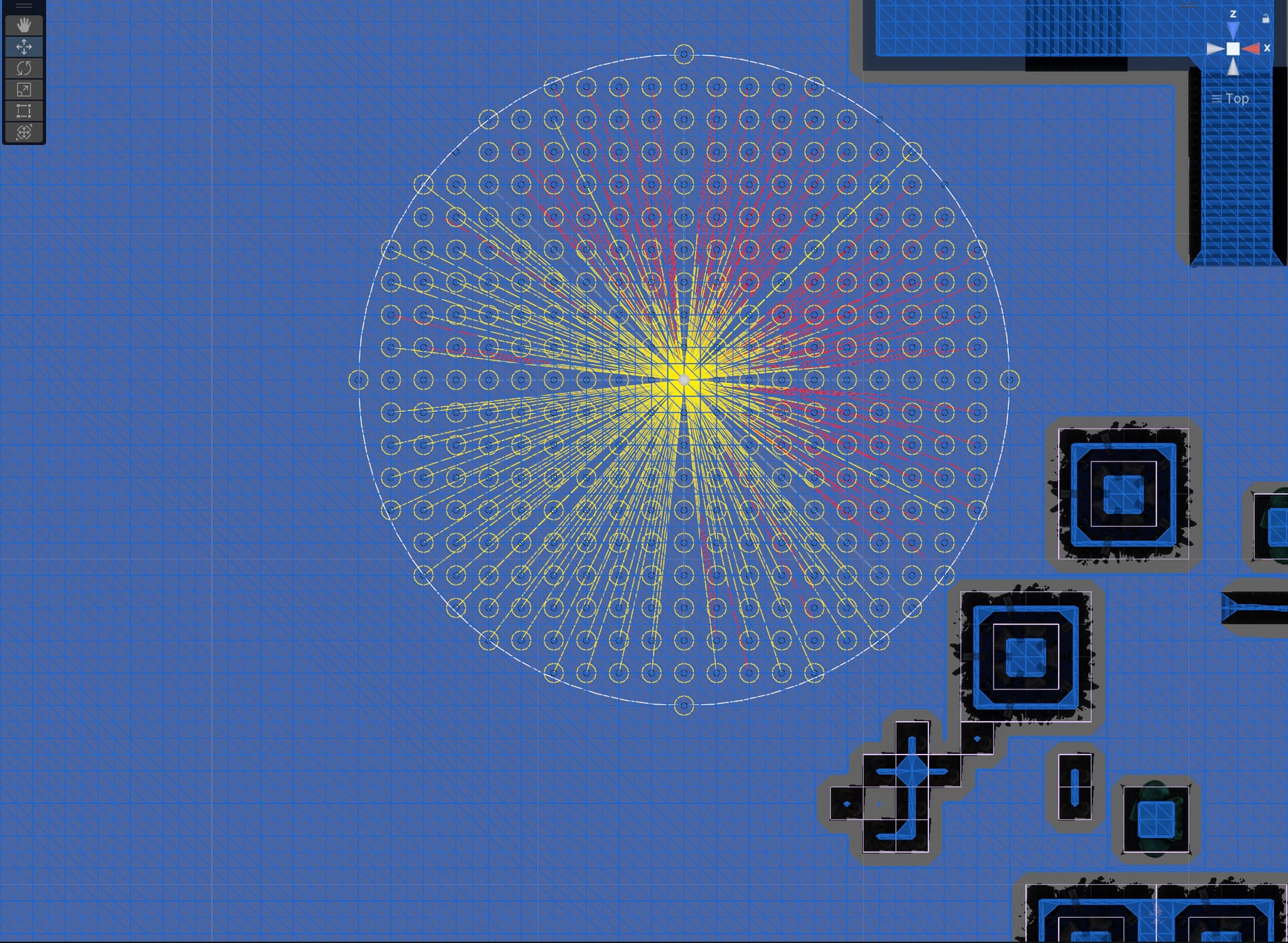
The problem is even worse for larger agents. Here are the results for a recast graph of an agent of size 5.
setup for agent of size 5.