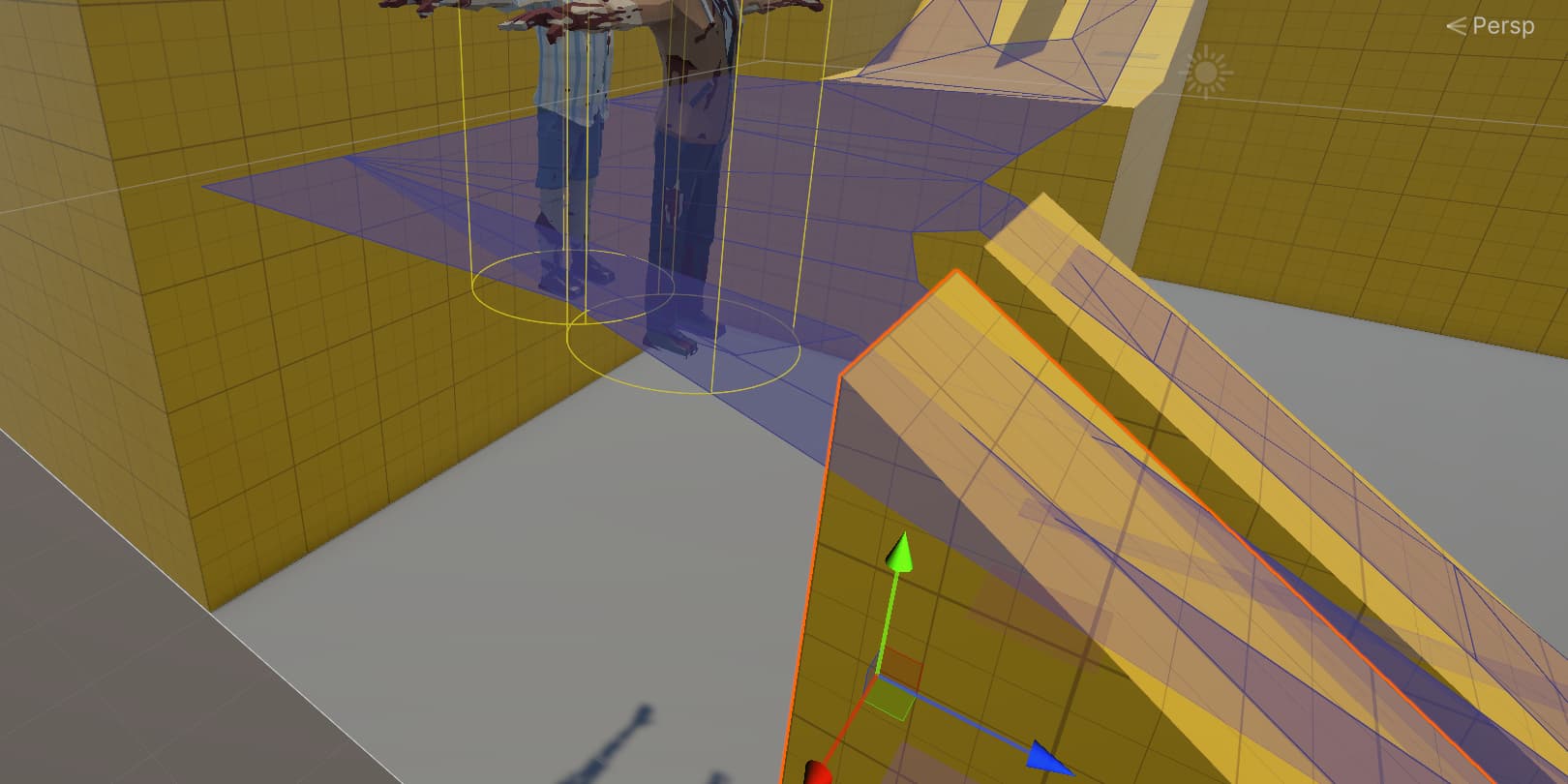
You might want to try adjusting the Agent Characteristics. It might be the max step height since it seems to resolve as the entity gets near the top of the slope. You could also try setting the agent radius really small, it looks too large to fit at the point of the slope.
If that doesn’t work, are you using RVO? In the RVOSimulator there is a setting to use the navmesh as obstacle, which resolved a similar jitter bug I had. If your not using it already it might be worth trying to add it with that setting enabled just to see if it fixes it.
I apologize, but even after trying all the measures you mentioned above, the issue persists.
I am using RVO, and I have also enabled the “use navmesh as obstacle” option in the RVO simulator, but the issue remains unchanged.
Increasing the Max Step Height or reducing the Agent Radius did not resolve the problem either.
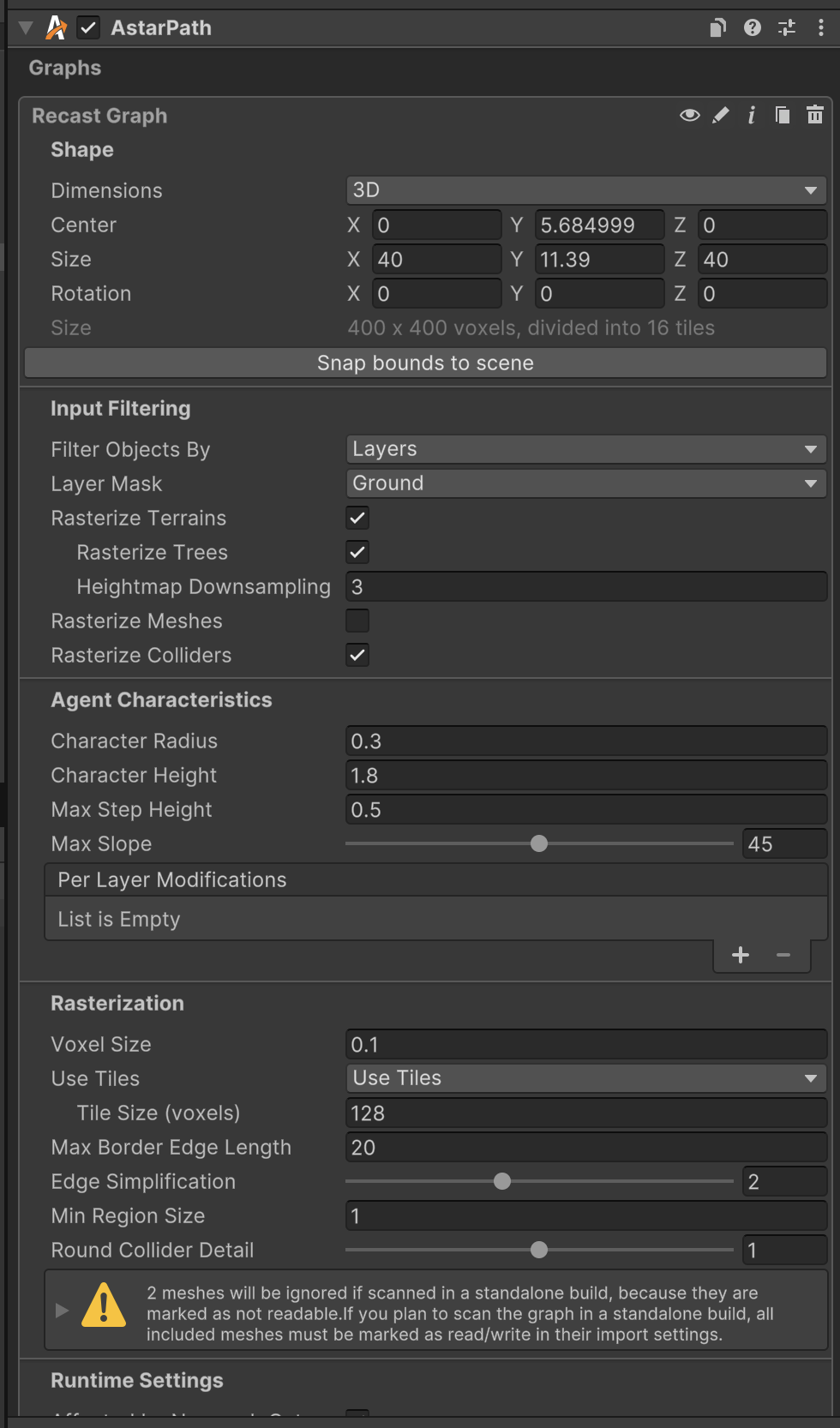
However, when I increased the Agent Radius in the AstarPath component from 0.3 to 0.4, the issue was resolved. (The FollowerEntity’s radius is 0.3.) It seems like the recast graph was properly generated after the adjustment.
But shouldn’t the Agent Radius in AstarPath and the FollowerEntity’s Radius be the same?
No, they don’t need to match exactly. You’re free to tweak them to your desired outcome. For example, you may want your agents to not be able to pathfind through a small crack, even if their agent can fit it.
As long as your AstarPath agent radius is larger than your agent’s radius, they won’t clip try to get too close to the wall.
Not sure if it’s particularly a “bug” more than it is just a need for tweaking. It’s “undesirable” but not sure about “bug”. Check this reply from another user for something that worked for them for pretty much this exact issue: