Hi,
I’m having an issue with my follower entities sometimes returning false when it should be true.
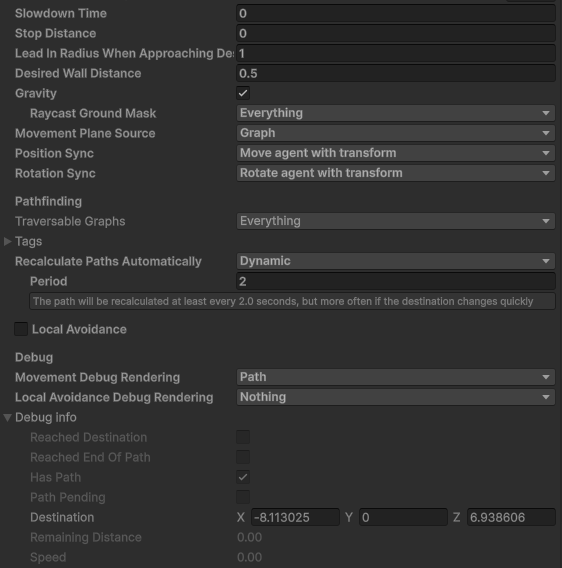
I have stopDistance = 0, and even remainingDistance and speed is at 0. I do not set its facing orientation.
What I’m confused about is why this only happens sometimes. Other times it’s correct and reachedEndOfPath and reachedDestination are both correctly set to true.
Any help is appreciated. Thanks!
Hi
I would recommend not setting stop distance to zero. Even if remaining distance looks like 0 in the inspector, it could be ever so slightly above zero (e.g. 0.0001), and that would prevent it from saying it has reached the destination.
Try for example stop distance = 0.01.
A slowdown time of 0 can also make the movement a bit unstable, I’d recommend a positive value.
It sounds like your style of movement might be better suited by the AILerp component, but it’s hard to say.
1 Like