This option relocates my unit simply considering the pivot (i.e. only if the pivot is outside the graph), I need to add some radius to it (doesn’t have to be accurate).
RVO obstacles and erosion are not valid alternatives.
This option relocates my unit simply considering the pivot (i.e. only if the pivot is outside the graph), I need to add some radius to it (doesn’t have to be accurate).
Hi
The navmesh surface is defined as all points where it is valid for the center of the character to be. Adding a radius to the constrain inside graph code would be very complex and it would also kinda break pathfinding (since it would be impossible for the agent to move to some spots that the pathfinding system thinks it should be able to move to). Take a look at this tutorial for an alternative approach: https://arongranberg.com/astar/docs/multipleagenttypes.html
"and it would also kinda break pathfinding (since it would be impossible for the agent to move to some spots that the pathfinding system thinks it should be able to move to). Take a look at this tutorial for an alternative approach: https://arongranberg.com/astar/docs/multipleagenttypes.html
"
This is not the case with my problem, I’m using a grid where each node is 5 meters and I need a maximum of 2 meters of radius.
If it is difficult, then I would like to try another way.
It is a different question, I thought about creating a new topic, but I think it is a valid solution if someone is with my exact same case and find this topic.
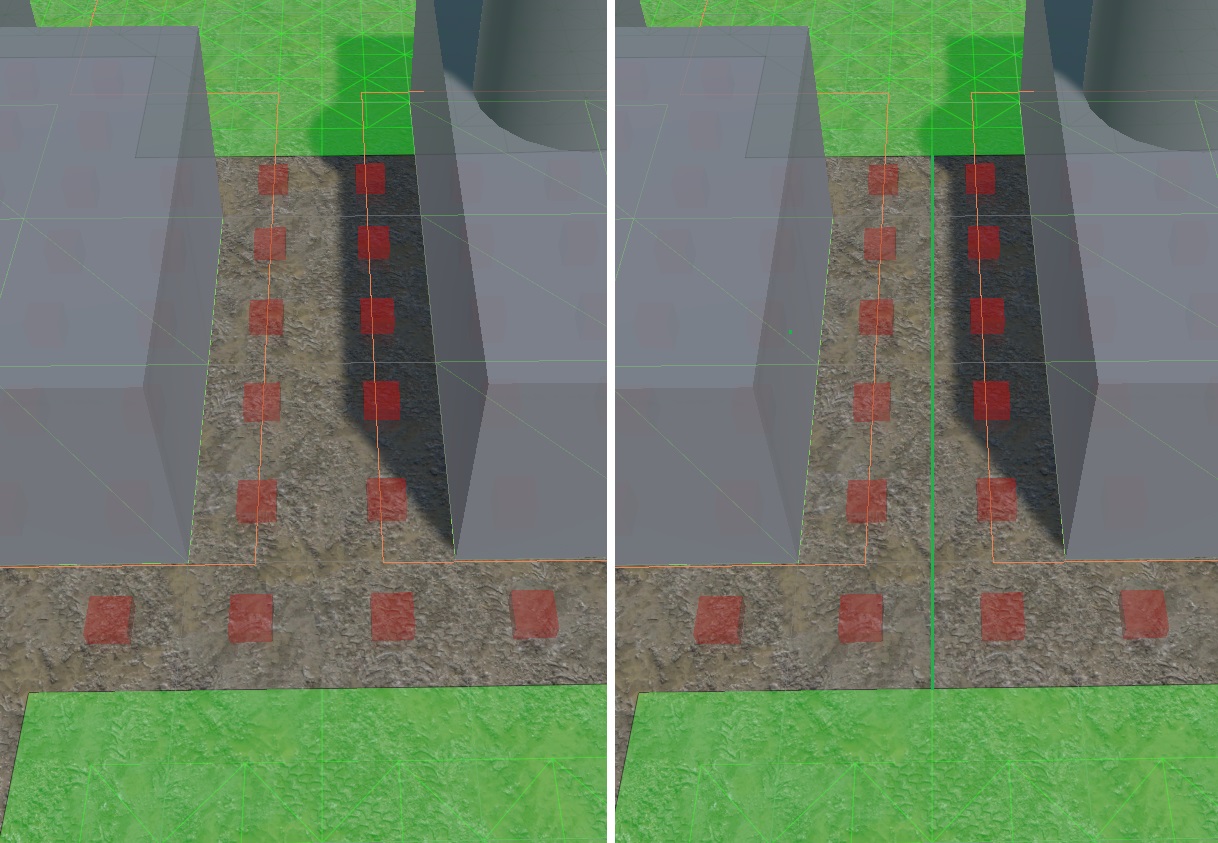
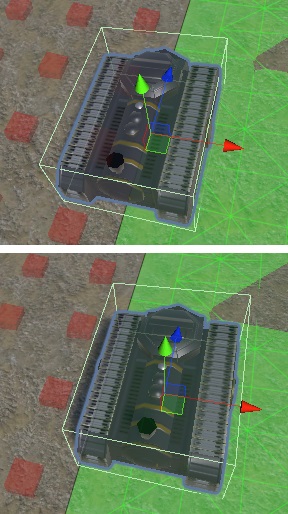
I instantiate 2 objects next to each other, and with GraphUpdateScene, I remove the walkability around the object to create a radius. However, between two objects (or any direction around the object, it doesn’t matter), I still want connections to pass between them.
If I decrease the size of each node to 2.5, besides being less optimized just to fix a little problem, my unit will enter the walls of the objects on the side if it drives on the side of the node. So I think this is my only solution.
Hi
What you show with the green line in the picture on the right is not possible to represent by the pathfinding system. Each node is a square and it is only possible to represent connections between two walkable squares. The data structures simply cannot represent anything else. So I would recommend lowering the node size and adjusting collision settings.