I am using a layered grid graph with some robot drones that fly around and am running into a few issues with my implementation.
Settings: Layered Grid Graph, erosion iterations 1, agents using Seeker class with AIPath, Funnel modifier, and RVO Controller.
I listed a few questions/issues I’ve run into below:
-
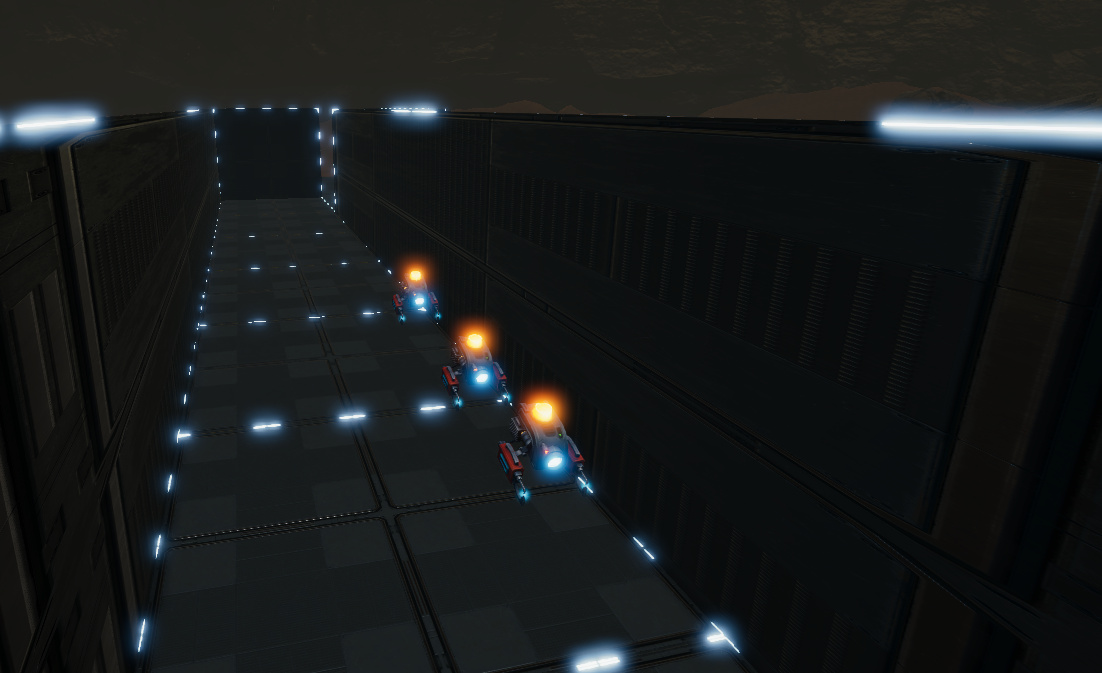
As you can see in the picture, the bots seem to hug the walls when going down the hallway. Is there anything besides increasing erosion that would make them tend to not stay on the nodes at the walls? The reason I prefer not to use erosion higher than 1 is because I use the “stay inside graph” option, and when there are a lot of enemies they should fill the hallway.
-
the bots always seem to get caught on a corner. it seems to only happen to one of them and the rest kind of bounce off of that one and make it around: https://imgur.com/a/3pAPJDq
-
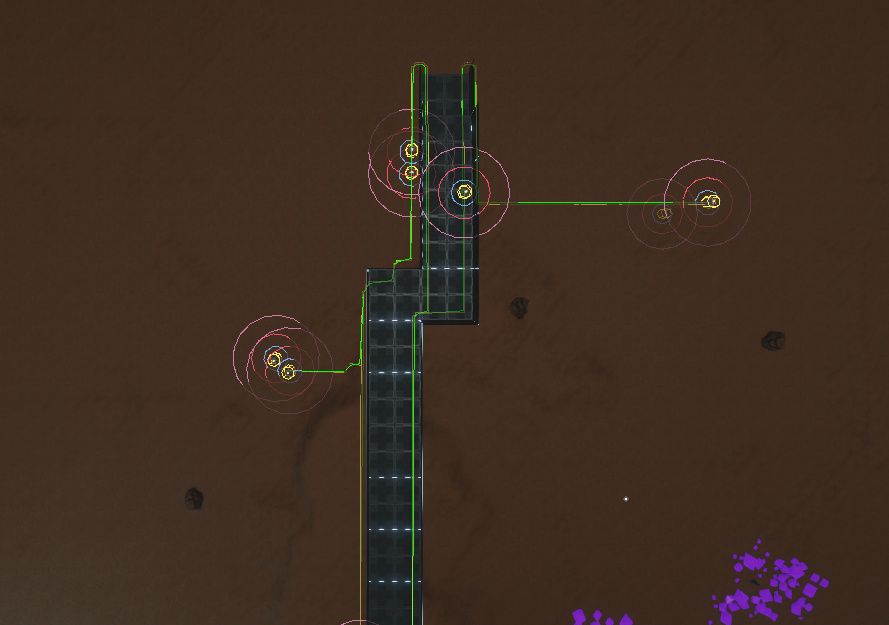
The bots go straight to the wall and then make their way to the entrance, instead of going in a straight line to the entrance, as you can see here:
I am using the funnel modifier and not sure why they are doing this, any help would be appreciated here. I can’t seem to figure out what settings are causing this. -
Sometimes the bots spawn and don’t move. I check the pathfinding scripts and they are running but the end point is always the current position and it doesn’t seem to calculate where the end point is ( I checked to make sure the destination target was being set). If I pause the game and restart, rescan, or even change focus of the window like when I hit the windows key and the start menu pops up, then they start moving. Any idea what might be the root cause of this?