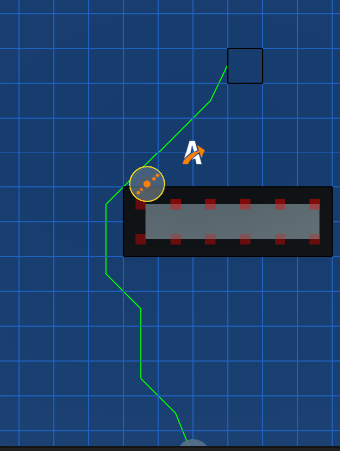
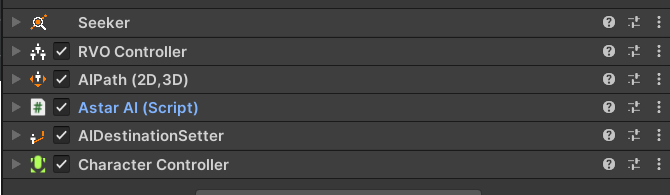
AI not following the path and moving into walls. They work fine with destination setter but when I use the script from the documentation to set up my own movement thats when they start running into obstacles.
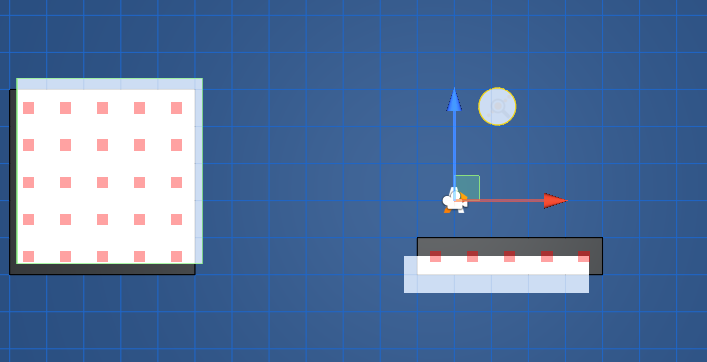
What I notice is that the mesh becomes misaligned after I played around with the grid parameters.
I would also like to know if RVO is applied when requesting paths from a script like below.
using UnityEngine;
// Note this line, if it is left out, the script won't know that the class 'Path' exists and it will throw compiler errors
// This line should always be present at the top of scripts which use pathfinding
using Pathfinding;
public class AstarAI : MonoBehaviour
{
public Transform targetPosition;
private Seeker seeker;
private CharacterController controller;
public Path path;
public Vector3[] _corners;
public float speed = 2;
public float nextWaypointDistance = 3;
private int currentWaypoint = 0;
public bool reachedEndOfPath;
public void Start()
{
seeker = GetComponent<Seeker>();
// If you are writing a 2D game you should remove this line
// and use the alternative way to move sugggested further below.
controller = GetComponent<CharacterController>();
// Start a new path to the targetPosition, call the the OnPathComplete function
// when the path has been calculated (which may take a few frames depending on the complexity)
seeker.StartPath(transform.position, targetPosition.position, OnPathComplete);
}
public void OnPathComplete(Path p)
{
Debug.Log("A path was calculated. Did it fail with an error? " + p.error);
if (!p.error)
{
path = p;
_corners = path.vectorPath.ToArray();
// Reset the waypoint counter so that we start to move towards the first point in the path
currentWaypoint = 0;
}
}
public void Update()
{
if (path == null)
{
// We have no path to follow yet, so don't do anything
return;
}
// Check in a loop if we are close enough to the current waypoint to switch to the next one.
// We do this in a loop because many waypoints might be close to each other and we may reach
// several of them in the same frame.
reachedEndOfPath = false;
// The distance to the next waypoint in the path
float distanceToWaypoint;
while (true)
{
// If you want maximum performance you can check the squared distance instead to get rid of a
// square root calculation. But that is outside the scope of this tutorial.
distanceToWaypoint = Vector3.Distance(transform.position, path.vectorPath[currentWaypoint]);
if (distanceToWaypoint < nextWaypointDistance)
{
// Check if there is another waypoint or if we have reached the end of the path
if (currentWaypoint + 1 < path.vectorPath.Count)
{
currentWaypoint++;
}
else
{
// Set a status variable to indicate that the agent has reached the end of the path.
// You can use this to trigger some special code if your game requires that.
reachedEndOfPath = true;
break;
}
}
else
{
break;
}
}
// Slow down smoothly upon approaching the end of the path
// This value will smoothly go from 1 to 0 as the agent approaches the last waypoint in the path.
var speedFactor = reachedEndOfPath ? Mathf.Sqrt(distanceToWaypoint / nextWaypointDistance) : 1f;
// Direction to the next waypoint
// Normalize it so that it has a length of 1 world unit
Vector3 dir = (path.vectorPath[currentWaypoint] - transform.position).normalized;
// Multiply the direction by our desired speed to get a velocity
Vector3 velocity = dir * speed * speedFactor;
// Move the agent using the CharacterController component
// Note that SimpleMove takes a velocity in meters/second, so we should not multiply by Time.deltaTime
controller.SimpleMove(velocity);
// If you are writing a 2D game you should remove the CharacterController code above and instead move the transform directly by uncommenting the next line
// transform.position += velocity * Time.deltaTime;
}
private void OnDrawGizmosSelected()
{
foreach (var corner in _corners)
{
Gizmos.DrawWireSphere(corner, .2f);
}
}
}