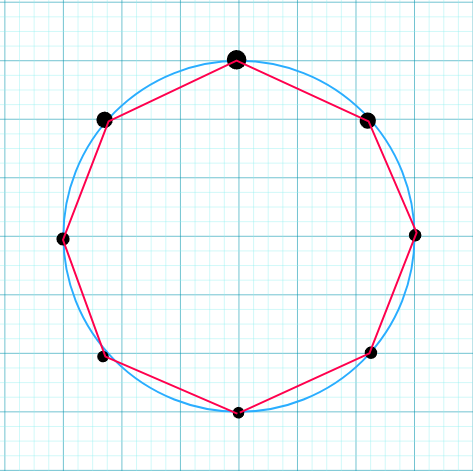
I’m trying to build out a behavior for characters where they move in a circle around their target–keeping some radius/distance away from them at all times. The diagram below shows what I’m going for basically, the black points being the target waypoints on the blue circle and the red path being the path I expect the agent to follow ultimately.
I compute the waypoints easily enough on my own but when it comes time to feeding these destinations to my RichAI agents on my Recast graph I seem to hit up against some path computation timing issues.
This is mentioned in the docs in the examples of creating your own movement scripts. Starting to compute the next path when nearing your current destination otherwise the agent may stand still for a frame or two while the next path computes. That makes sense generally, but writing a completely new movement script seems overkill for this. Not to mention this would sidestep the advantages of the RichAI script such as the funnel simplification.
I have tried using a custom p ath anyway. Trying to use a custom path with the RichAI by having the seeker precompute the journey to the next waypoint causes an error to pop up due to the RichAI agent listening to the seeker’s path compute complete event. Even disabling computePath on RichAI doesn’t stop this error however.