Hi all, just started working with this package and so far I’m greatly enjoying it. The local avoidance is much more polished than what I had been able to achieve previously, but there seems to be some weird case that I don’t think I’m understanding correctly.
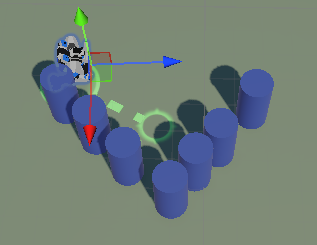
In this image I have the blue locked agents arranged in a triangle to test moving around all of them when passing by. (which works fantastic). The issue however is my unit seems to be afraid of going into the area, instead they will continue to circle the triangle as if all 3 sides were covered.
What I assume would happen is that the unit will see that there is nothing blocking its path to the destination and can move there, that the other agents detected are further away than the destination.
I’m using the build in local avoidance that is with the FollowerEntity. Here is the local avoidance settings I have.
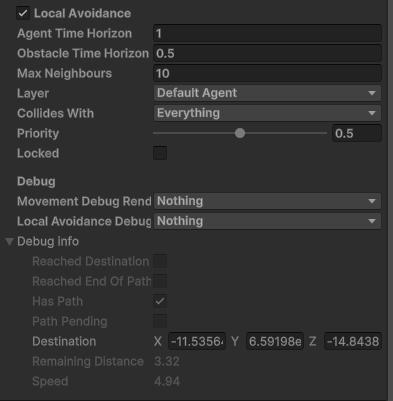
The locked agents have a priority of 30 and the unit moving has 50.
I’m hoping to understand why this behavior is happening so I can remediate it in some way.