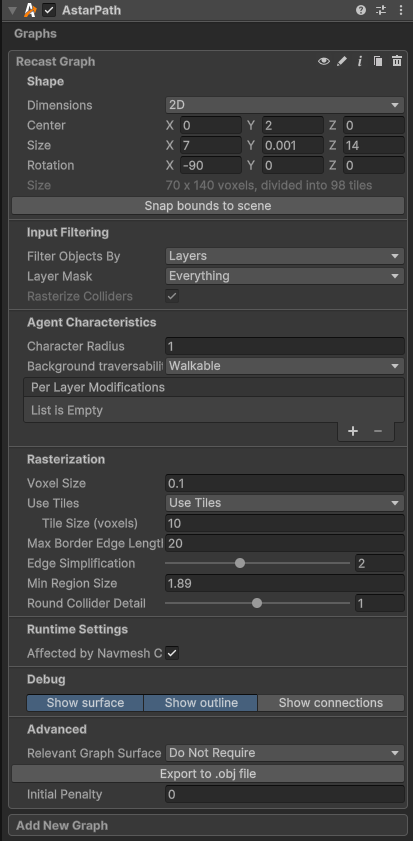
I am currently using the A* Pathfinding Project asset to develop a 2D game.
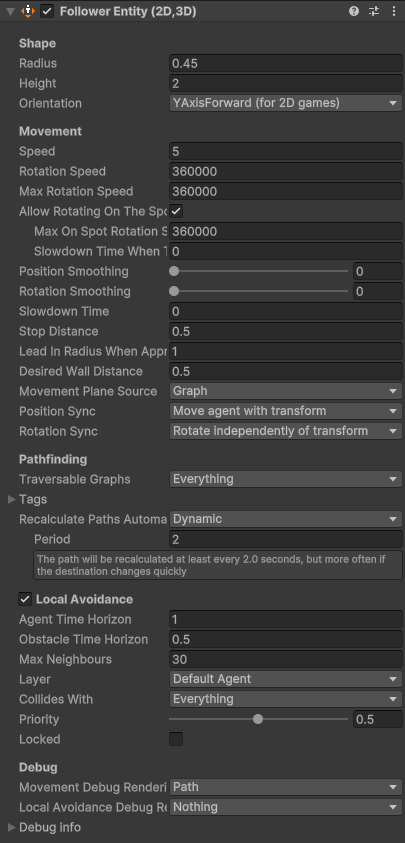
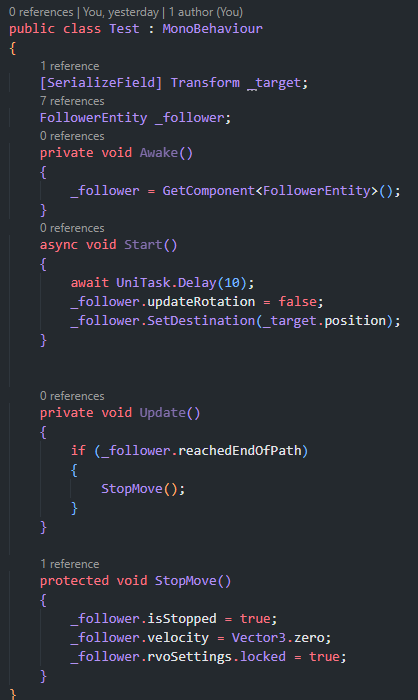
I implemented AI movement using the FollowEntity component.
However, as shown in the video, when the characters avoid obstacles, they take the path to the right even though the left side is open.
I want the characters to move along the shortest path without favoring one direction.
Chiming in on this. We’re also using the RVOController-component to handle the steering of our agents. And we observe the same behavior. If a crowd of agents move along the Z axis (positive direction), they tend to crowd counter clockwise on/near the common target. If they move along Z axis (negative direction), they crowd clock wise. Along positive X and the crowd counter clockwise (and wise versa).
So angle of approach and general direction seem to cause a specific circling behavior. Which looks a bit odd. They should crowd around the target in equal left/right amount, but they dont.
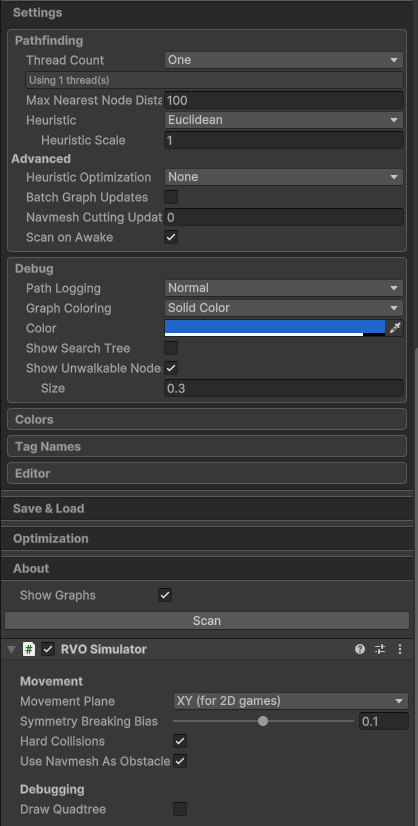
The local avoidance system has a bias for turning right, to break symmetries. This is actually very useful in most situations, since it will make agents resolve crowded situations much more quickly.
You can adjust the strength of this bias on the RVOSimulator component (it’s called the “Symmetry Breaking Bias”).