So I’m not sure what is going on maybe there is something wrong with the pathfinding or I am doing something wrong.
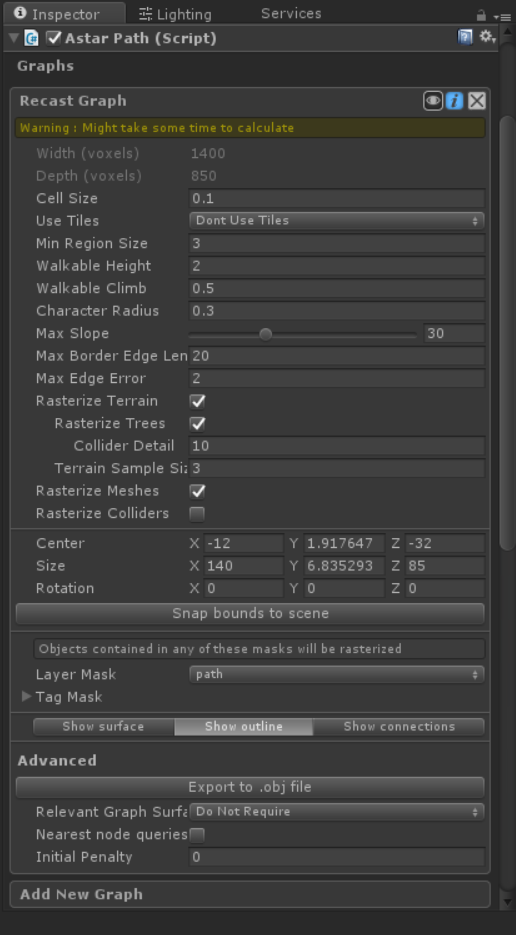
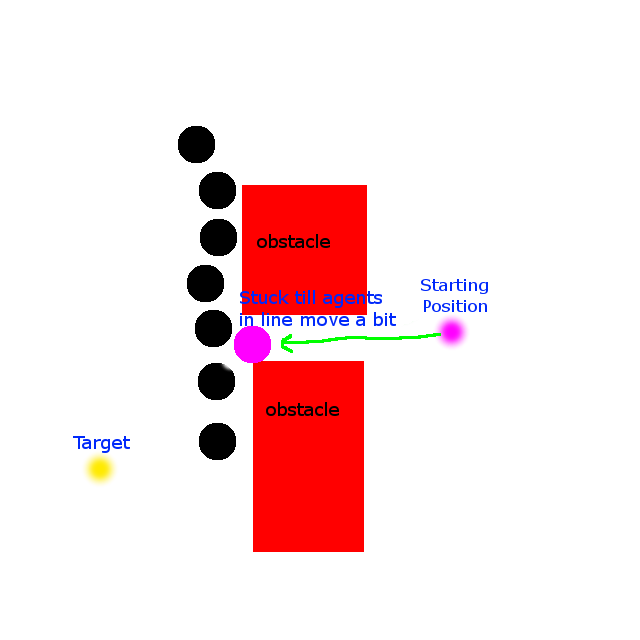
The problem is when I have a line of agents behind each other and other agent tries to go across that line, he gets stuck on the line of agents the image below should explain a lot. Here are the settings I’m using, First I’m using the a Navmesh graph
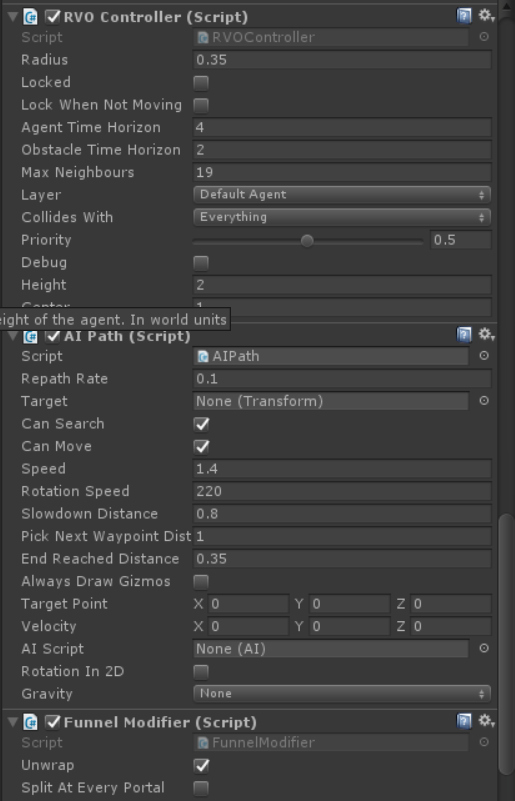
I also have the RVO Simulator and RVO Navmesh
And on my agent I have the seeker component, AIPath, RVO controller, Funnel modifier and, radius modifier.

Some agents have slightly different speeds.
This image should explain a lot about the problem.
Expected / Wanted behaviour.
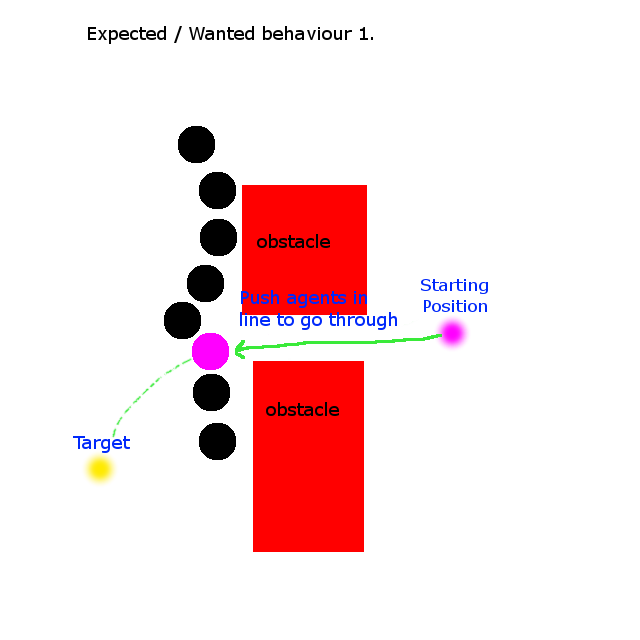
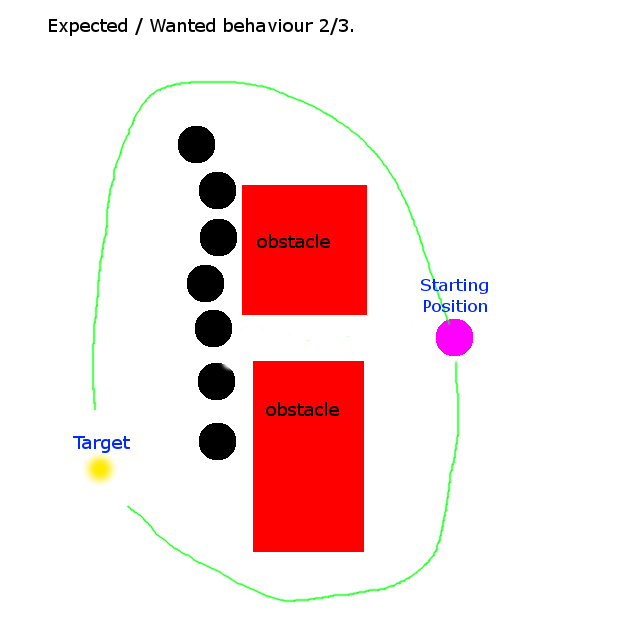
Agents in black reached their destination (target) and waiting for their next target to be set.
What can I do about that? Can anyone help? I know solution 2 can be hard and it would be awesome if possible, but I’m sure solution 1 is easy and it must be possible, but how?
Thanks in advance,