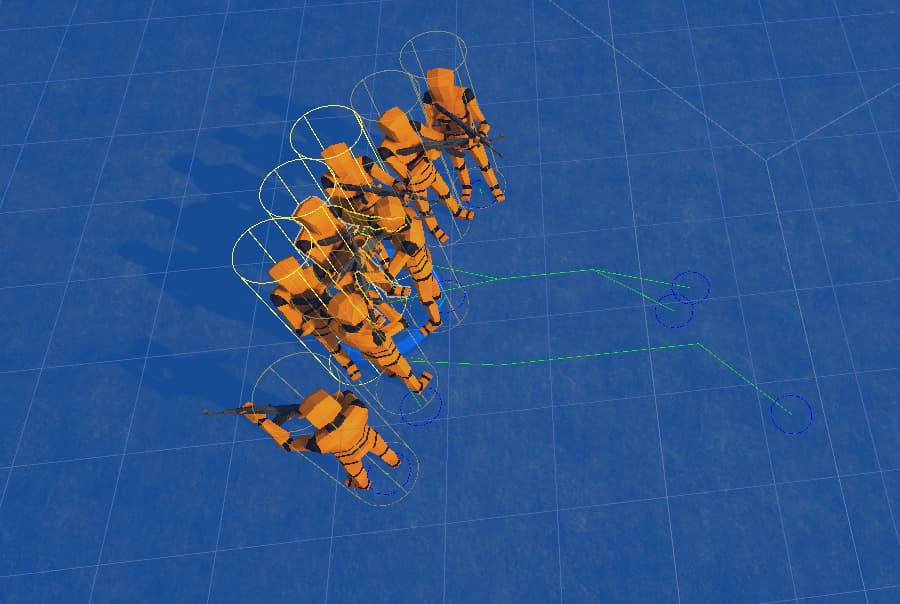
I have a situation where I have some units making a line with the RVO Controller property “Lock When Not Moving” enable and when I set the destination of another friendly unit behind that line instead of go around, it just run infinitely inside the other units.
I obviously want to make him create a path for avoiding my units (red arrow I draw).
See the screen below :
I worked a lot on this problem this week and cannot find a suitable & smooth solution.
Anyway I tried the BETA version after reading that could improve avoidance system.
I saw the symetry breaking bias in the RVO simulator trying to handle my problem (and it does for the exemple I show above, with some strange move sometime but it solve the problem).
But it’s still in BETA and with other cases it don’t work properly (with many agents trying to focus 1 enemy Agent for exemple), they start running with high speed around their destination.
But as I said it’s still in BETA and it show Aron is trying to add this kind of feature.
Once again, if someone have a solution please answer me, but if the solution is to wait for the features in the BETA, I understand.
I will continue finding a solution on my side and let u know if I found something usefull.
I’ve never manage to get RVO to work for characters that stop moving, only when they are all moving at the same time, the solution was to activate a nested gameobject that has a collider and is assigned to the obstacle layer, so the character on certain conditions just becomes another obstacle that all the other characters try to avoid, when that condition has gone I turn it off and they can bump into each other again
With the particular issue in @Bob_Bigglesworth’s screenshot, I think the beta version should help. It has improved support for avoiding clumps of agents that are locked.
However, note that the local avoidance system really is built for agents to all take their part in resolving the collision. Locking agents will make it harder for agents to find their path.