Hello. I just purchased the Pro for the RVO and its not working with the pathfinding at all. Kind of panicking.
I have a basic grid graph with characters that I could get to follow a good path with Raycast modifier to spread out the points, but the objects would run into each other and they would create paths through each other which is not what I need, they need to seemlessly move around each other, but still be able to interact with each other when needed. So i purchased Pro only for the RVO.
But now with the RVO it makes almost no difference because the waypoints are fairly close together, even with Raycast modifier Quality set to highest. Waypoints also still track through other agents with RVO Controllers on them as well, then the character get stuck trying to go around just like before. Would really appreciate some help in fixing this.
Here’s some images of what I mean. Here you can see the path for the suited character going right through another RVO Controller character. Then in the second image it gets stuck
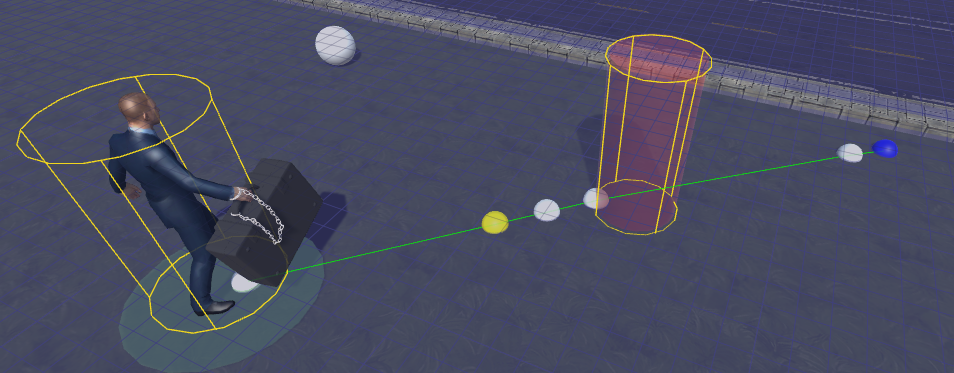
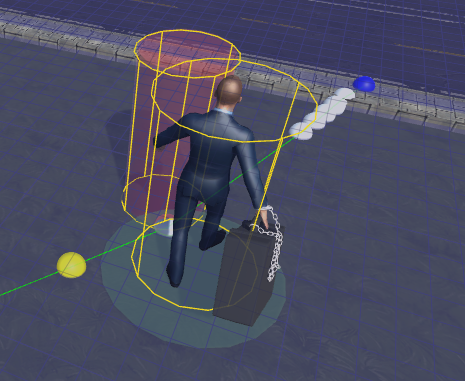
Its getting stuck because it can’t reach that waypoint that is underneath the red cylinder, where are represented by the little spheres. so it just sits there.
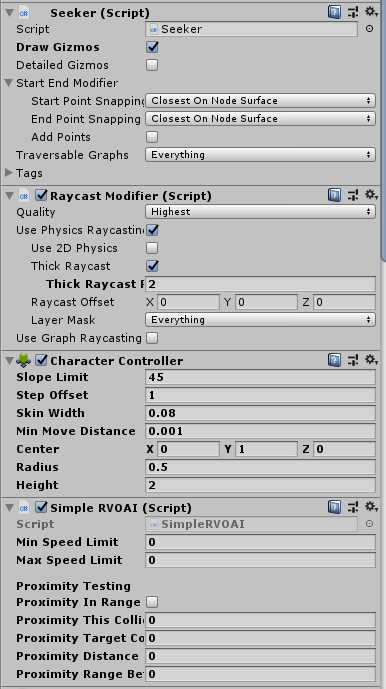
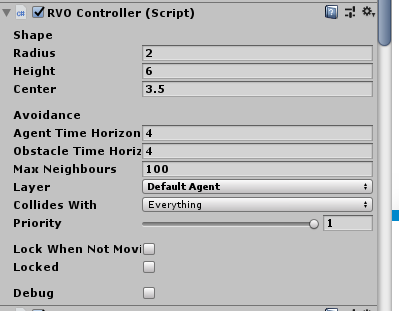
Here are the components on my suited character
Here’s how I build the paths
public void NewPath(Vector3 fromPosition, Vector3 toPosition, string pathType, bool startWaypointOne )
{
seeker.StartPath(fromPosition, toPosition, (Path p) => CustomPathCallback(p, pathType, startWaypointOne ));
}
public void CustomPathCallback(Path p, string pathType, bool startWaypointOne)
{
if (!p.error)
{
if (startWaypointOne)
{
currentWaypoint = 1;
}
else
{
currentWaypoint = 0;
}
foreach (WaypointSpheres ws in waypointSpheres)
{
GameObject.Destroy(ws.sphereObject);
}
waypointSpheres.Clear();
for (int x = 0; x < p.vectorPath.Count; x++)
{
waypointSpheres.Add(new WaypointSpheres(p.vectorPath[x], currentWaypoint, x, p.vectorPath.Count));
}
path = p;
}
}
void FixedUpdate()
{
if (basicProperties.currentState == "Walking")
{
// if there's no path at this point, just return
if (path == null)
{
return;
}
// if there is a path and reached the end, destroy the path and don't continue
if (currentWaypoint >= path.vectorPath.Count)
{
basicProperties.isMoving = false;
path = null;
return;
}
// if got this far, do the moving and rotating
if (simpleRVOAI.RotatedTowards(path.vectorPath[currentWaypoint], Time.fixedDeltaTime))
{
simpleRVOAI.MoveCharacter(path.vectorPath[currentWaypoint], path.vectorPath[path.vectorPath.Count - 1], Time.fixedDeltaTime);
}
if (Vector3.Distance(transform.position, path.vectorPath[currentWaypoint]) < basicProperties.gridMoveRangeThreshold)
{
currentWaypoint++;
}
}
}
And hers how I’m moving the character
// Update is called once per frame
public void MoveCharacter(Vector3 targetPoint, Vector3 finalPoint, float deltaTime)
{
// Set the desired point to move towards using a desired speed of 10 and a max speed of 12
controller.SetTarget(targetPoint, minSpeedLimit, maxSpeedLimit);
// Calculate how much to move during this frame
// This information is based on movement commands from earlier frames
// as local avoidance is calculated globally at regular intervals by the RVOSimulator component
Vector3 delta = controller.CalculateMovementDelta(transform.position, deltaTime * 1);
characterController.Move(delta); // SimpleMove causes decelleration at end point
}
In the movment script, i put targetPoint as the next waypoint and finalPoint as the last waypoint thinking i could use the SetTarget as finalWaypoint and the characterController.Move on the current waypoint, but then it just totally ignores the waypoints, but does avoid objects. Which is pointless because if it ignores waypoints it can’t get around anything.
I noticed after posting that the suited character has a priority of 1, while it was 0.5 for the cylinder. I changed both to 0.5 and it didnt solve the issue
Thanks for your help