If anyone has encountered problems with the graph update scene with polygon collider especially for 2D isometric. You can use this.
public class GraphUpdateScene2D : GraphModifier
{
/// <summary>
/// Penalty to add to nodes.
/// Usually you need quite large values, at least 1000-10000. A higher penalty means that agents will try to avoid those nodes more.
///
/// Be careful when setting negative values since if a node gets a negative penalty it will underflow and instead get
/// really large. In most cases a warning will be logged if that happens.
///
/// See: tags (view in online documentation for working links) for another way of applying penalties.
/// </summary>
public uint penaltyValue;
/// <summary>Nodes will be made walkable or unwalkable according to this value if <see cref="modifyWalkability"/> is true</summary>
public bool setWalkable = true;
/// <summary>Apply this graph update object whenever a graph is rescanned</summary>
public bool applyOnScan = true;
/// <summary>
/// Should the tags of the nodes be modified.
/// If enabled, set all nodes' tags to <see cref="setTag"/>
/// </summary>
public bool modifyTag;
[HideInInspector]
/// <summary>If <see cref="modifyTag"/> is enabled, set all nodes' tags to this value</summary>
public int setTag;
public bool firstApplied = false;
public bool scanOnStart = true;
private void Start()
{
if (!firstApplied && scanOnStart)
{
Apply();
}
}
public override void OnPostScan()
{
if (applyOnScan) Apply();
}
/// <summary>
/// Updates graphs with a created GUO
/// representing the polygon of this object and update all graphs using AstarPath.UpdateGraphs.
/// </summary>
public void Apply()
{
firstApplied = true;
if (AstarPath.active == null)
{
Debug.LogError("There is no AstarPath object in the scene", this);
return;
}
PolygonCollider2D polygonCollider = GetComponent<PolygonCollider2D>();
if (polygonCollider == null)
{
Debug.LogError("There is no PolygonCollider2D attached");
}
else
{
AstarPath.active.AddWorkItem(new AstarWorkItem(ctx =>
{
NavGraph[] graphs = AstarPath.active.graphs;
foreach (NavGraph graph in graphs)
{
GridGraph gg = (GridGraph)graph;
if (gg == null) { continue; }
for (int z = 0; z < gg.depth; z++)
{
for (int x = 0; x < gg.width; x++)
{
var node = gg.GetNode(x, z);
Vector3 pos = (Vector3)node.position;
if (polygonCollider.OverlapPoint(new Vector2(pos.x, pos.y)))
{
node.Penalty = penaltyValue;
node.Walkable = setWalkable;
if (modifyTag)
node.Tag = (uint)setTag;
}
}
}
}
}));
}
}
}
Then put this in an Editor folder.
[CustomEditor(typeof(GraphUpdateScene2D))]
[CanEditMultipleObjects]
public class GraphUpdateSceneEditor2D : EditorBase
{
protected override void Inspector()
{
base.Inspector();
EditorGUI.BeginChangeCheck();
EditorGUI.indentLevel = 0;
DrawTagField();
EditorGUILayout.Separator();
if (EditorGUI.EndChangeCheck())
{
EditorUtility.SetDirty(target);
// Repaint the scene view if necessary
// if (!Application.isPlaying || EditorApplication.isPaused) SceneView.RepaintAll();
}
}
void DrawTagField()
{
var tagValue = FindProperty("setTag");
EditorGUI.indentLevel++;
EditorGUI.showMixedValue = tagValue.hasMultipleDifferentValues;
EditorGUI.BeginChangeCheck();
var newTag = EditorGUILayoutx.TagField("Tag Value", tagValue.intValue, () => AstarPathEditor.EditTags());
if (EditorGUI.EndChangeCheck())
{
tagValue.intValue = newTag;
}
if (GUILayout.Button("Tags can be used to restrict which units can walk on what ground. Click here for more info", "HelpBox"))
{
}
EditorGUI.indentLevel--;
}
}
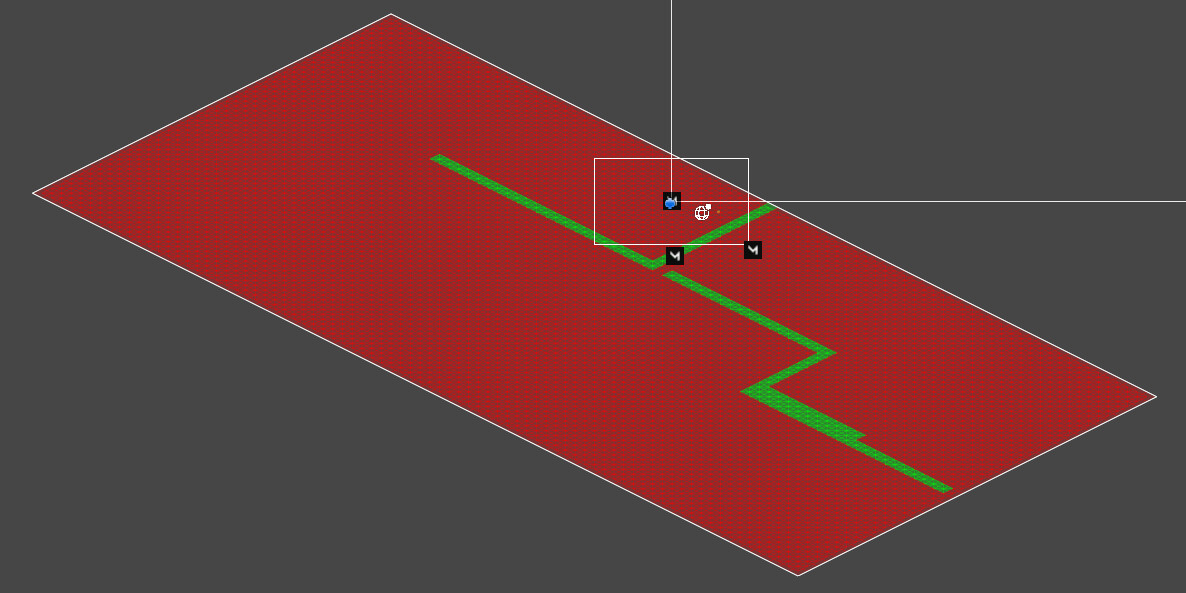
You can now make more complex weighted paths like these. Hope this helps.