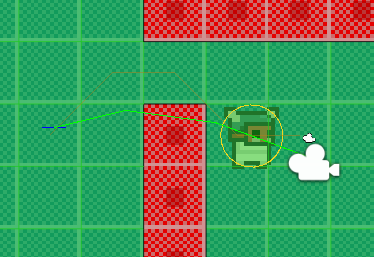
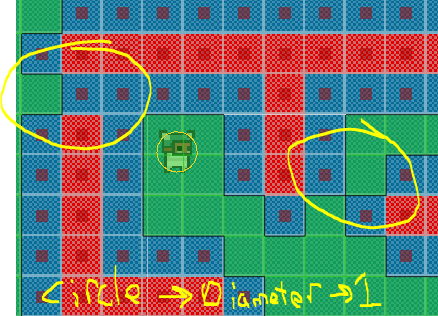
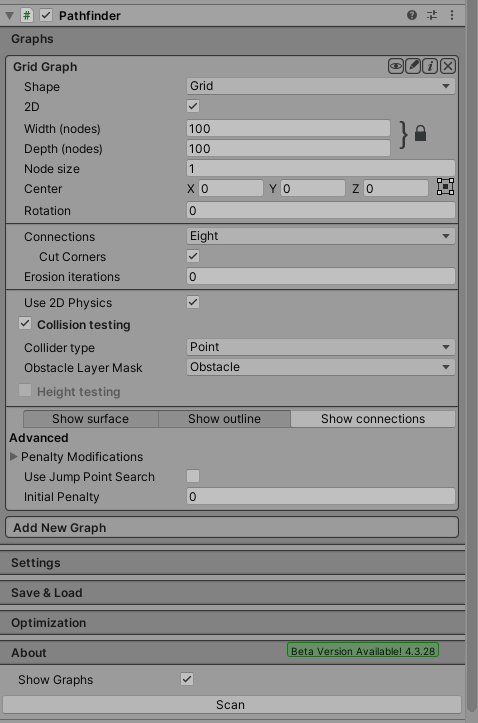
My agent is frequently running into walls. Someone else was having this problem and they changed the ColliderType->Circle diameter and it helped. I am using ColliderType-> Point because other wise, it creates way to much of gap between walls to the point that the agent cannot go through small openings.
Any help would be appreciated!